PMG: Parameterized Motion Generator for Human-like Locomotion Control
作者: Chenxi Han, Yuheng Min, Zihao Huang, Ao Hong, Hang Liu, Yi Cheng, Houde Liu
分类: cs.RO, cs.AI
发布日期: 2026-02-13
备注: 2026 IEEE International Conference on Robotics & Automation
💡 一句话要点
提出参数化运动生成器PMG,实现类人运动控制与高效的Sim-to-Real迁移
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 人形机器人 运动控制 参数化运动生成 模仿学习 Sim-to-Real VR遥操作
📋 核心要点
- 现有基于参考轨迹的人形机器人全身控制方法,需要大量高质量数据,且难以适应不同速度、姿态和机器人标定。
- 论文提出参数化运动生成器(PMG),通过分析人类运动结构,利用少量参数化运动数据和高维控制指令合成参考轨迹。
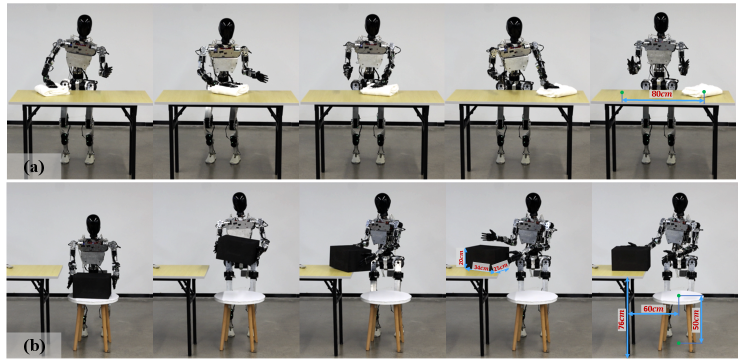
- 在人形机器人ZERITH Z1上验证了PMG,实现了自然类人运动,精确响应高维控制输入,并实现了高效的Sim-to-Real迁移。
📝 摘要(中文)
本文提出了一种参数化运动生成器(PMG),旨在解决人形机器人运动控制中存在的实际挑战。现有方法依赖大量高质量数据,难以适应高维控制指令和多样化的任务环境,且对速度、姿态和机器人标定敏感。PMG基于对人类运动结构的分析,仅使用少量参数化的运动数据和高维控制指令,即可实时合成参考轨迹。结合模仿学习流程和基于优化的Sim-to-Real电机参数识别模块,在人形机器人原型ZERITH Z1上验证了该方法。实验结果表明,PMG能够生成自然、类人的运动,精确响应高维控制输入(包括基于VR的遥操作),并实现高效、可验证的Sim-to-Real迁移。该研究为实现自然且可部署的人形机器人控制提供了一条实用的、经过实验验证的途径。
🔬 方法详解
问题定义:现有的人形机器人运动控制方法,特别是基于参考轨迹的全身控制,面临着数据依赖性强、泛化能力弱以及对机器人标定敏感等问题。这些方法通常需要大量高质量的运动捕捉数据,难以适应新的任务环境和控制指令,并且在从仿真环境迁移到真实机器人时,性能会显著下降。
核心思路:本文的核心思路是借鉴人类运动的内在结构,设计一个参数化的运动生成器(PMG)。PMG通过学习少量参数化的运动数据,并结合高维控制指令,实时生成参考轨迹。这种方法避免了对大量数据的依赖,提高了泛化能力,并且更容易进行Sim-to-Real迁移。
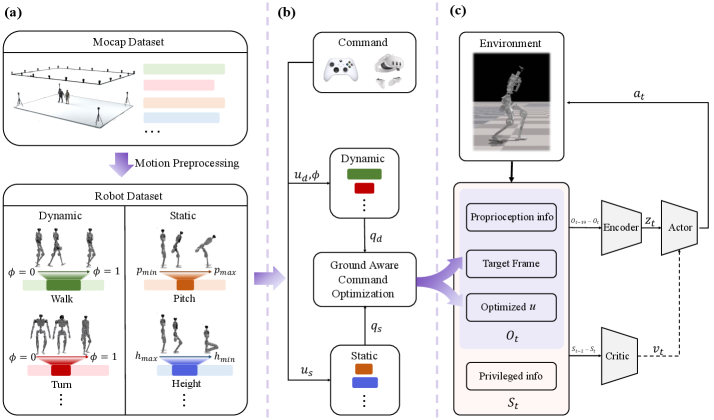
技术框架:整体框架包含三个主要模块:1) 参数化运动生成器(PMG):根据高维控制指令和少量参数化运动数据,生成参考轨迹。2) 模仿学习流程:利用模仿学习算法,训练一个低级别的控制器,使其能够跟踪PMG生成的参考轨迹。3) 基于优化的Sim-to-Real电机参数识别模块:通过优化算法,识别真实机器人的电机参数,从而减小仿真环境和真实环境之间的差异。
关键创新:最重要的技术创新点在于参数化运动生成器(PMG)的设计。PMG通过对人类运动结构的分析,将复杂的运动分解为一系列参数化的基元。这些基元可以根据控制指令进行组合和调整,从而生成各种不同的运动轨迹。这种方法不仅减少了对大量数据的依赖,还提高了运动的自然性和可控性。
关键设计:PMG的关键设计包括:1) 参数化运动数据的选择:选择能够代表人类运动基本特征的运动数据,例如步态周期、步长、步高等。2) 控制指令的编码方式:设计一种能够有效表达高维控制指令的编码方式,例如使用VR设备进行遥操作。3) 模仿学习算法的选择:选择一种能够有效跟踪参考轨迹的模仿学习算法,例如Dagger或GAIL。4) 基于优化的Sim-to-Real电机参数识别模块:使用优化算法,例如梯度下降法,来识别真实机器人的电机参数。
🖼️ 关键图片
📊 实验亮点
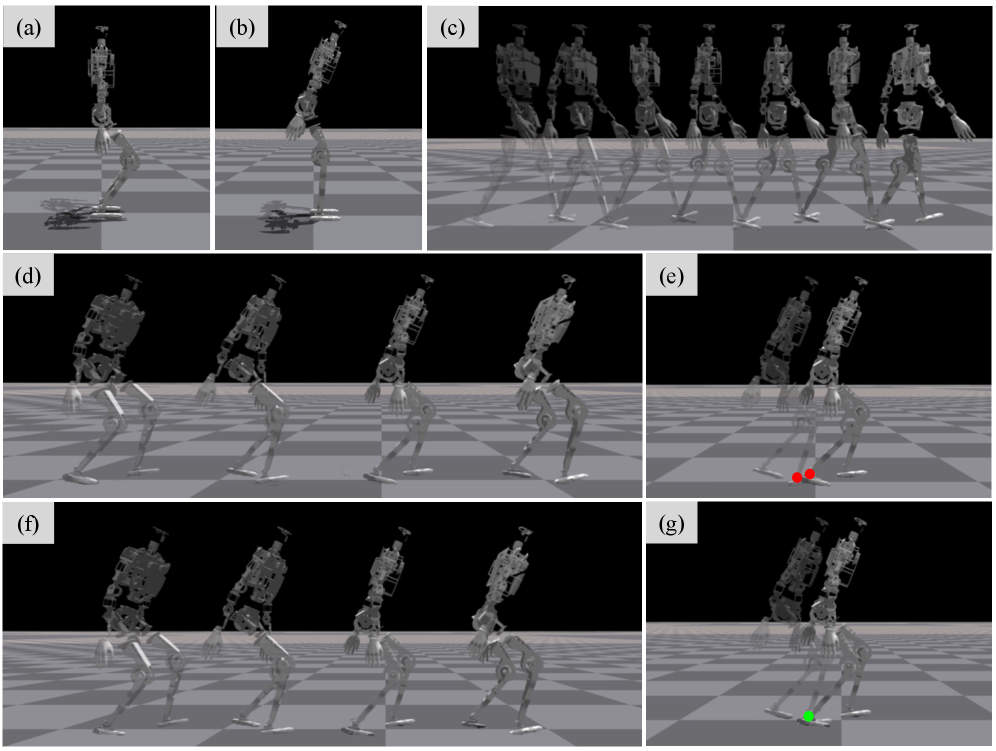
实验结果表明,PMG能够生成自然、类人的运动,并且能够精确响应高维控制输入,例如VR遥操作。与传统的基于参考轨迹的方法相比,PMG在运动的自然性和可控性方面都有显著提升。此外,PMG还实现了高效的Sim-to-Real迁移,使得在仿真环境中训练的控制器可以直接部署到真实机器人上,而无需进行大量的调整。
🎯 应用场景
该研究成果可应用于人形机器人的各种实际场景,例如:VR遥操作、搜救、医疗辅助、家庭服务等。通过PMG,人形机器人可以更加自然、灵活地执行各种任务,并能够更好地适应不同的环境和控制指令。此外,该方法还可以降低人形机器人的开发成本和部署难度,加速人形机器人的商业化进程。
📄 摘要(原文)
Recent advances in data-driven reinforcement learning and motion tracking have substantially improved humanoid locomotion, yet critical practical challenges remain. In particular, while low-level motion tracking and trajectory-following controllers are mature, whole-body reference-guided methods are difficult to adapt to higher-level command interfaces and diverse task contexts: they require large, high-quality datasets, are brittle across speed and pose regimes, and are sensitive to robot-specific calibration. To address these limitations, we propose the Parameterized Motion Generator (PMG), a real-time motion generator grounded in an analysis of human motion structure that synthesizes reference trajectories using only a compact set of parameterized motion data together with High-dimensional control commands. Combined with an imitation-learning pipeline and an optimization-based sim-to-real motor parameter identification module, we validate the complete approach on our humanoid prototype ZERITH Z1 and show that, within a single integrated system, PMG produces natural, human-like locomotion, responds precisely to high-dimensional control inputs-including VR-based teleoperation-and enables efficient, verifiable sim-to-real transfer. Together, these results establish a practical, experimentally validated pathway toward natural and deployable humanoid control.