Multi Graph Search for High-Dimensional Robot Motion Planning
作者: Itamar Mishani, Maxim Likhachev
分类: cs.RO, cs.AI
发布日期: 2026-02-12
备注: Submitted for Publication
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出多图搜索(MGS)算法,解决高维机器人运动规划中效率与一致性难题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人运动规划 多图搜索 高维空间 搜索算法 机械臂 移动机器人 路径规划
📋 核心要点
- 高维机器人运动规划面临效率和一致性的挑战,现有算法在提高可扩展性的同时,往往牺牲运动轨迹的可预测性和一致性。
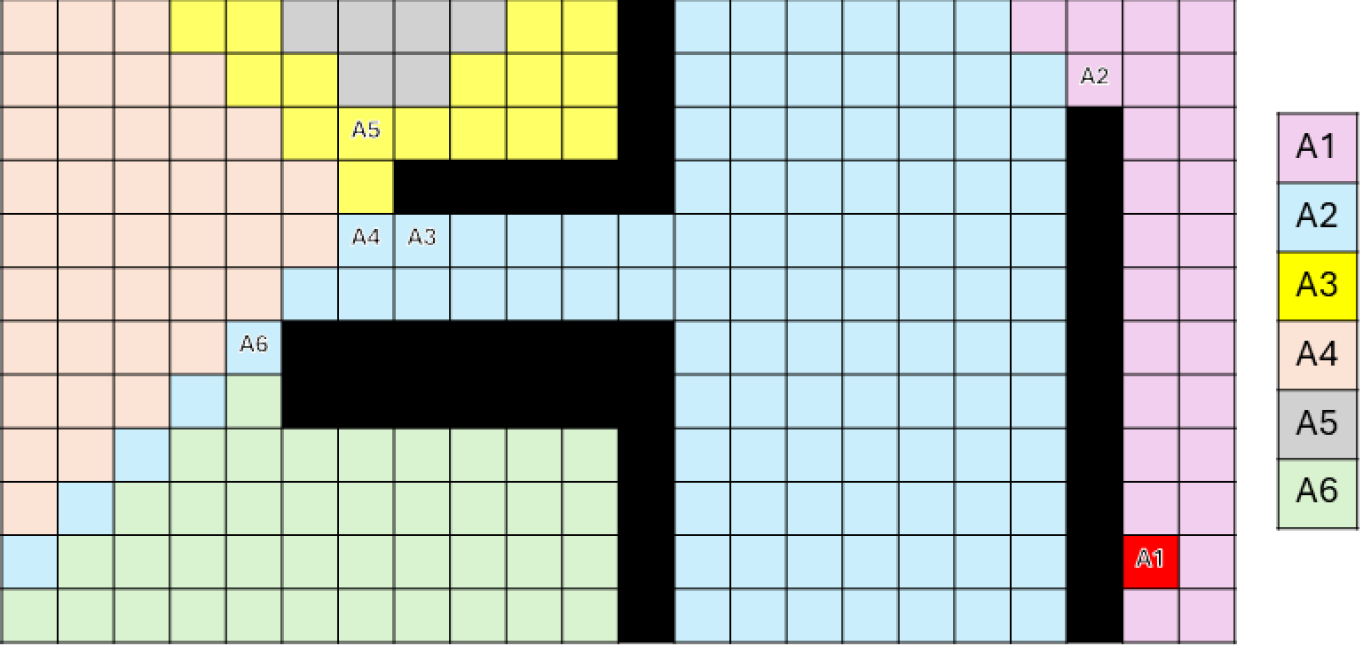
- 多图搜索(MGS)算法通过维护和扩展多个隐式图,聚焦高潜力区域,并允许子图合并,从而实现高效的运动规划。
- 实验结果表明,MGS在机械臂和移动机械臂任务中表现出色,验证了其完备性和有界次优性。
📝 摘要(中文)
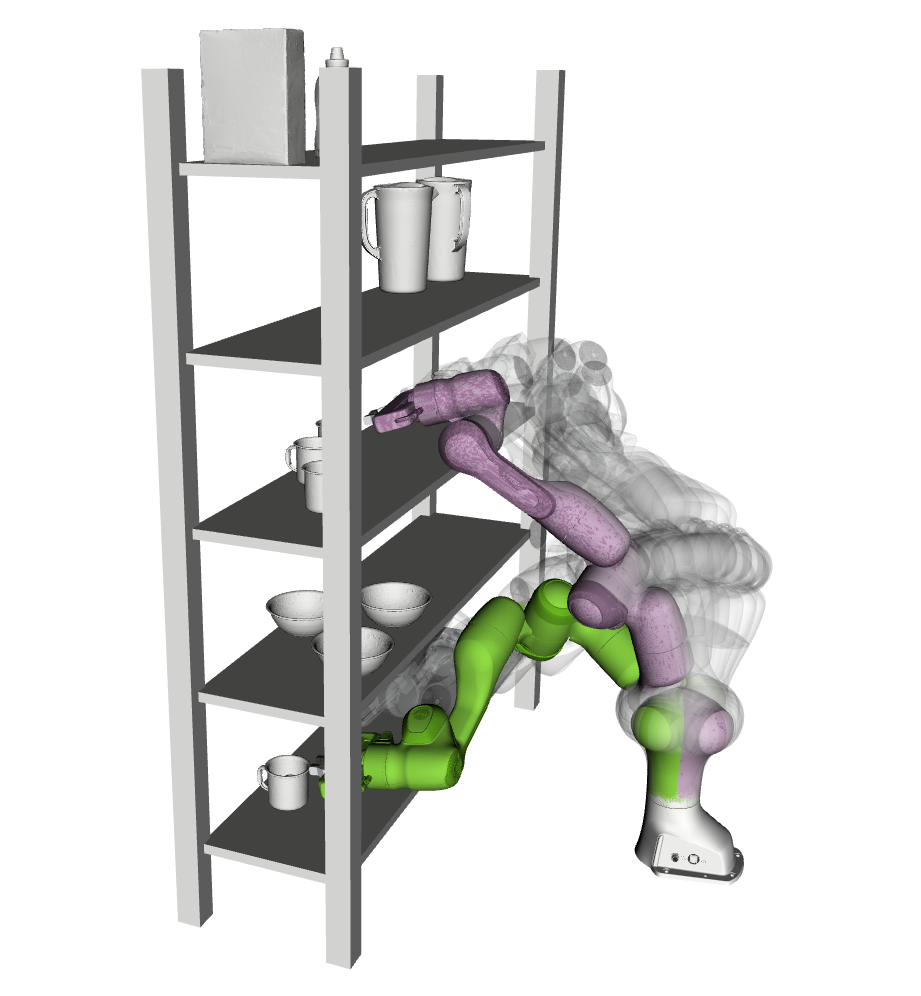
针对高维机器人系统(如机械臂和移动机械臂)高效运动规划的需求,本文提出了一种基于搜索的运动规划算法——多图搜索(MGS)。MGS将经典单向和双向搜索推广到多图设置。该算法维护并增量扩展状态空间上的多个隐式图,将探索重点放在高潜力区域,并允许最初断开的子图随着搜索的进行通过可行转换进行合并。论文证明了MGS的完备性和有界次优性,并通过一系列机械臂和移动机械臂任务的实验验证了其有效性。相关演示、基准测试和代码可在https://multi-graph-search.github.io/获取。
🔬 方法详解
问题定义:高维机器人运动规划需要高效且一致的运动轨迹。现有算法在扩展到高维状态空间时,通常会生成不可预测或不一致的运动,或者需要过多的计算资源和内存。这些问题限制了机器人在实时操作和可靠部署中的应用。
核心思路:MGS的核心思路是将传统的单图搜索扩展到多图搜索。通过维护多个独立的图,算法可以并行地探索状态空间的不同区域。这种并行探索有助于更快地找到可行路径,同时避免陷入局部最优。当不同的图之间存在可行的连接时,算法会将它们合并,从而逐步构建完整的路径。
技术框架:MGS算法的主要流程如下: 1. 初始化:创建多个独立的图,每个图代表状态空间的一个子区域。 2. 扩展:在每个图中,根据一定的策略(例如A*搜索),选择节点进行扩展,生成新的节点和边。 3. 连接:定期检查不同图之间是否存在可行的连接。如果存在,则将这些图合并。 4. 终止:当找到从起始状态到目标状态的路径,或者达到最大迭代次数时,算法终止。
关键创新:MGS的关键创新在于其多图搜索的框架。与传统的单图搜索相比,MGS可以并行地探索状态空间的不同区域,从而提高搜索效率。此外,MGS通过动态地合并图,可以在探索过程中逐步构建完整的路径,从而避免陷入局部最优。
关键设计:MGS的关键设计包括: 1. 图的数量:图的数量会影响算法的并行度和内存消耗。需要根据具体的任务和计算资源进行调整。 2. 扩展策略:扩展策略决定了如何选择节点进行扩展。可以使用A*搜索、RRT等不同的策略。 3. 连接策略:连接策略决定了如何判断不同图之间是否存在可行的连接。可以使用采样、碰撞检测等方法。
🖼️ 关键图片

📊 实验亮点
论文通过在机械臂和移动机械臂任务上的实验验证了MGS算法的有效性。实验结果表明,MGS算法在搜索效率和路径质量方面均优于传统的单图搜索算法。具体性能数据和对比基线可在论文和相关网站上找到。
🎯 应用场景
MGS算法可应用于各种高维机器人运动规划场景,如工业机械臂的自动化装配、移动机器人的导航、以及人机协作等。该算法能够提高机器人的运动效率和可靠性,使其在复杂环境中执行任务成为可能,具有重要的实际应用价值和广阔的未来发展前景。
📄 摘要(原文)
Efficient motion planning for high-dimensional robotic systems, such as manipulators and mobile manipulators, is critical for real-time operation and reliable deployment. Although advances in planning algorithms have enhanced scalability to high-dimensional state spaces, these improvements often come at the cost of generating unpredictable, inconsistent motions or requiring excessive computational resources and memory. In this work, we introduce Multi-Graph Search (MGS), a search-based motion planning algorithm that generalizes classical unidirectional and bidirectional search to a multi-graph setting. MGS maintains and incrementally expands multiple implicit graphs over the state space, focusing exploration on high-potential regions while allowing initially disconnected subgraphs to be merged through feasible transitions as the search progresses. We prove that MGS is complete and bounded-suboptimal, and empirically demonstrate its effectiveness on a range of manipulation and mobile manipulation tasks. Demonstrations, benchmarks and code are available at https://multi-graph-search.github.io/.