Pack it in: Packing into Partially Filled Containers Through Contact
作者: David Russell, Zisong Xu, Maximo A. Roa, Mehmet Dogar
分类: cs.RO
发布日期: 2026-02-12
备注: 8 pages, 5 figures
💡 一句话要点
提出一种接触感知的装箱方法,用于在部分填充容器中放置物品
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱四:生成式动作 (Generative Motion)
关键词: 装箱问题 机器人操作 接触感知 轨迹优化 模型预测控制
📋 核心要点
- 现有装箱方法主要针对空容器,忽略了实际仓库中容器通常已被部分填充的情况,导致效率降低。
- 该方法利用与现有物体的接触交互,通过轨迹优化在部分填充的容器中创造空间,实现更有效的装箱。
- 该方法集成了物理感知系统,即使在物体被遮挡时也能准确估计姿态,并预测可行的放置位置。
📝 摘要(中文)
仓库运营的自动化对于提高生产力并减少人员暴露于危险环境至关重要。仓库中经常执行的一项操作是装箱,即需要将物品放入容器中,无论是为了交付给客户还是为了在仓库中临时存储。以往的装箱工作主要集中在将物品装入空容器中,并采用无碰撞策略。然而,通常情况下,容器已经被部分填充了物品,而且由于在仓库中运输,物品的排列往往不是最优的。本文提出了一种接触感知的装箱方法,该方法利用与先前放置的物体的有目的的交互来创建自由空间,从而成功放置新物品。这通过在模型预测控制器中使用基于接触的多物体轨迹优化器来实现,该优化器与一个物理感知的感知系统集成,该系统即使在不可避免的遮挡期间也能估计物体姿态,以及一种建议在容器内放置物体的物理可行位置的方法。
🔬 方法详解
问题定义:论文旨在解决在部分填充的容器中进行装箱的问题。现有方法主要针对空容器,或者采用无碰撞策略,无法有效利用已有的空间,并且忽略了与现有物体的交互。这导致装箱效率低下,尤其是在仓库环境中,容器经常处于非最优的填充状态。
核心思路:论文的核心思路是利用与已放置物体的接触交互,通过轻微的推动、旋转等操作,创造出新的空间,从而实现更紧凑的装箱。这种方法打破了传统的无碰撞装箱的限制,允许算法主动地调整环境,以适应新的物品。
技术框架:该方法主要包含三个模块:1) 物理感知的感知系统,用于估计容器内物体的姿态,即使在存在遮挡的情况下也能准确识别;2) 基于接触的多物体轨迹优化器,用于规划新物品的放置轨迹,并考虑与现有物体的接触交互;3) 模型预测控制器,用于实时调整机器人的运动,以实现规划的轨迹。此外,还包括一个位置建议模块,用于预先筛选出物理上可行的放置位置。
关键创新:该方法最重要的创新在于其接触感知的装箱策略。与传统的无碰撞方法不同,该方法主动利用与现有物体的接触,通过轨迹优化来创造空间。这种方法能够更有效地利用容器内的空间,实现更紧凑的装箱。此外,物理感知的感知系统也提高了物体姿态估计的鲁棒性。
关键设计:轨迹优化器采用多目标优化,同时考虑放置的稳定性、与现有物体的碰撞避免(在非接触阶段)以及接触力的大小。模型预测控制器使用力/位混合控制,以确保在接触过程中施加适当的力。位置建议模块使用启发式规则,例如优先考虑靠近容器边缘的位置,以减少搜索空间。
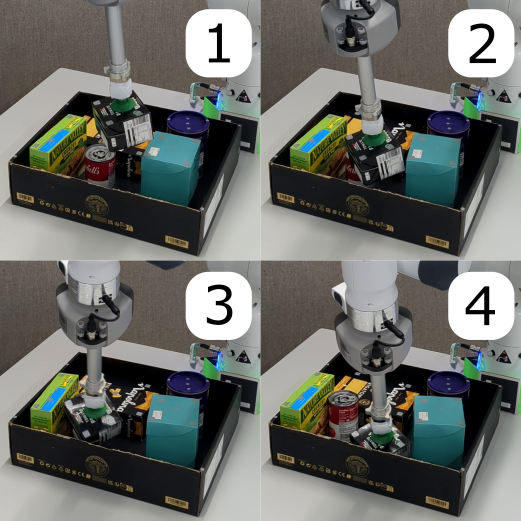
🖼️ 关键图片


📊 实验亮点
论文提出了一种接触感知的装箱方法,通过与现有物体的交互,能够更有效地利用容器空间。实验结果表明,该方法在部分填充的容器中能够成功放置新的物品,并且能够处理复杂的遮挡情况。虽然论文中没有给出具体的性能数据,但其接触感知的策略为解决实际仓库中的装箱问题提供了一种新的思路。
🎯 应用场景
该研究成果可广泛应用于自动化仓库、物流分拣中心等场景,提高装箱效率,降低人工成本。通过更有效地利用容器空间,可以减少运输次数,降低物流成本。此外,该技术还可以应用于机器人辅助的家庭整理,帮助人们更有效地利用储物空间。
📄 摘要(原文)
The automation of warehouse operations is crucial for improving productivity and reducing human exposure to hazardous environments. One operation frequently performed in warehouses is bin-packing where items need to be placed into containers, either for delivery to a customer, or for temporary storage in the warehouse. Whilst prior bin-packing works have largely been focused on packing items into empty containers and have adopted collision-free strategies, it is often the case that containers will already be partially filled with items, often in suboptimal arrangements due to transportation about a warehouse. This paper presents a contact-aware packing approach that exploits purposeful interactions with previously placed objects to create free space and enable successful placement of new items. This is achieved by using a contact-based multi-object trajectory optimizer within a model predictive controller, integrated with a physics-aware perception system that estimates object poses even during inevitable occlusions, and a method that suggests physically-feasible locations to place the object inside the container.