Safety Beyond the Training Data: Robust Out-of-Distribution MPC via Conformalized System Level Synthesis
作者: Anutam Srinivasan, Antoine Leeman, Glen Chou
分类: cs.RO, cs.LG, eess.SY, math.OC
发布日期: 2026-02-12
💡 一句话要点
提出基于保形预测和系统级综合的鲁棒分布外MPC方法,提升模型预测控制的安全性。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 保形预测 系统级综合 鲁棒控制 分布外泛化 非线性系统 自动驾驶 机器人
📋 核心要点
- 现有方法在模型预测控制中,当模型超出训练数据分布时,难以保证安全性和鲁棒性。
- 利用保形预测(CP)估计模型误差,并将其融入基于系统级综合(SLS)的鲁棒MPC框架中,实现约束收紧。
- 在4D汽车和12D四旋翼飞行器等系统上验证,结果表明该方法在分布外数据上显著提升了安全性和鲁棒性。
📝 摘要(中文)
本文提出了一种新颖的框架,用于鲁棒的分布外规划和控制,该框架利用保形预测(CP)和系统级综合(SLS)。该方法旨在解决当学习的动力学模型超出训练数据分布范围时,确保安全性和鲁棒性的挑战。首先,我们使用加权CP和学习到的、依赖于状态-控制的协方差模型,推导出高置信度的模型误差界限。然后,将这些界限集成到基于SLS的鲁棒非线性模型预测控制(MPC)公式中,该公式通过体积优化的前向可达集在预测范围内执行约束收紧。我们提供了关于分布漂移下的覆盖率和鲁棒性的理论保证,并分析了数据密度和轨迹管大小对预测覆盖率的影响。在经验上,我们在复杂度不断增加的非线性系统(包括4D汽车和12D四旋翼飞行器)上验证了我们的方法,与固定边界和非鲁棒基线相比,提高了安全性和鲁棒性,尤其是在数据分布之外。
🔬 方法详解
问题定义:论文旨在解决在模型预测控制(MPC)中,当学习的动力学模型应用于训练数据分布之外的场景时,如何保证系统的安全性和鲁棒性。现有的MPC方法通常依赖于对模型误差的固定界限估计,这在分布外数据上可能过于乐观,导致安全风险。
核心思路:论文的核心思路是利用保形预测(Conformal Prediction, CP)来估计模型误差,并将其转化为MPC中的约束收紧。CP能够提供具有一定置信度的预测区间,从而为MPC提供更可靠的模型不确定性信息。此外,论文还结合了系统级综合(System Level Synthesis, SLS)框架,以便高效地进行鲁棒MPC设计。
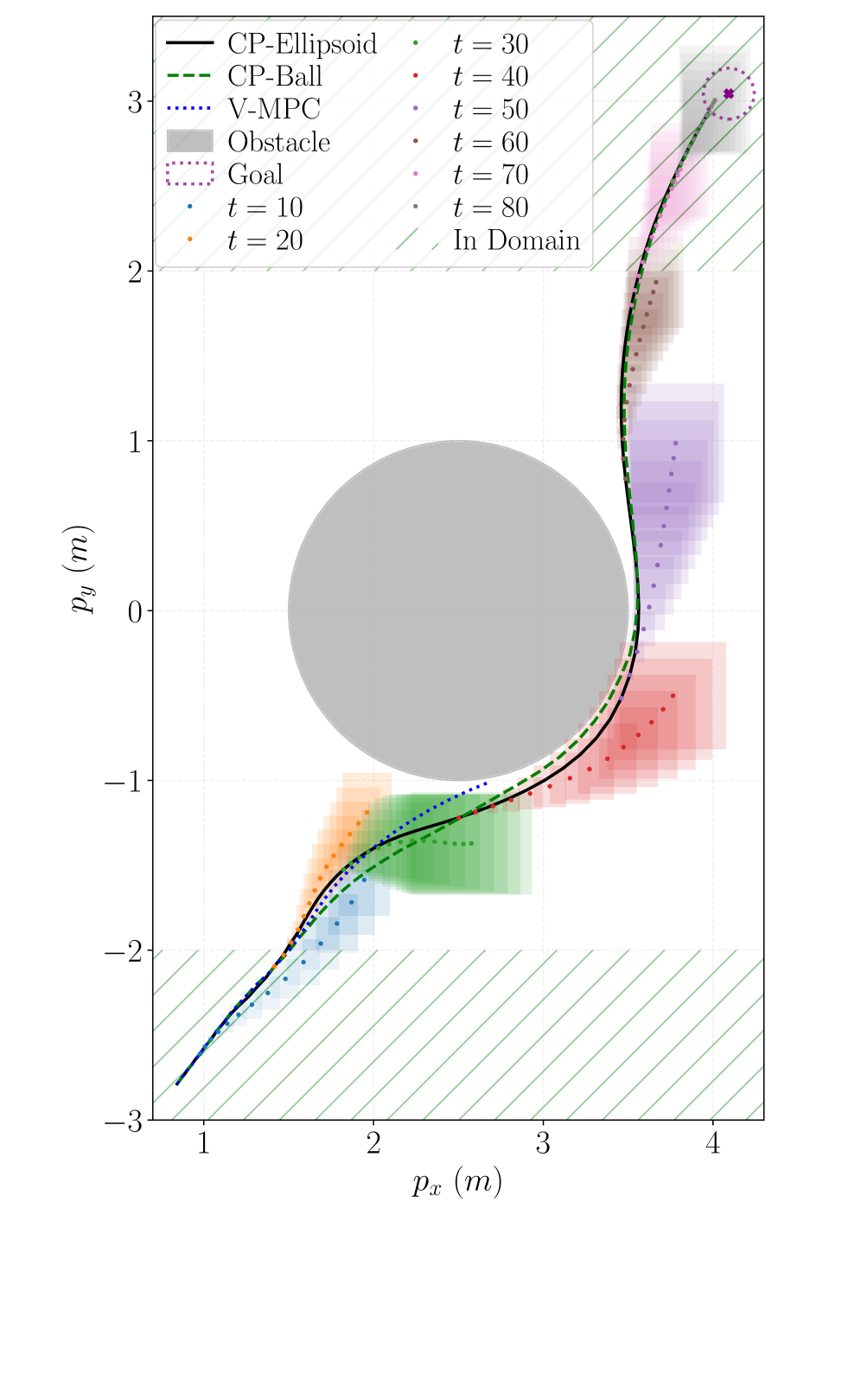
技术框架:整体框架包含以下几个主要模块:1) 学习状态-控制相关的协方差模型,用于加权CP;2) 使用加权CP计算高置信度的模型误差界限;3) 将误差界限集成到基于SLS的鲁棒非线性MPC公式中;4) 通过体积优化的前向可达集在预测范围内执行约束收紧。整个流程旨在确保在模型预测过程中,即使模型存在误差,也能满足安全约束。
关键创新:论文的关键创新在于将保形预测与系统级综合相结合,用于解决分布外MPC问题。与传统的固定边界方法相比,CP能够提供数据驱动的、具有统计保证的误差界限,从而更准确地反映模型的不确定性。此外,SLS框架能够高效地进行鲁棒MPC设计,降低计算复杂度。
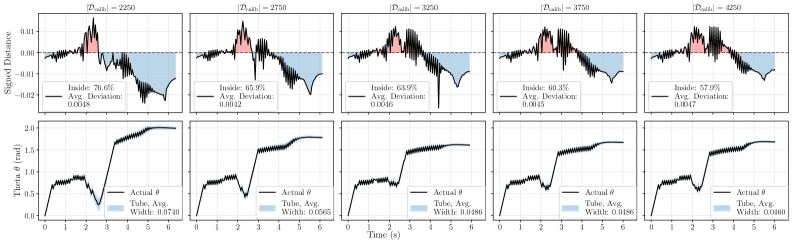
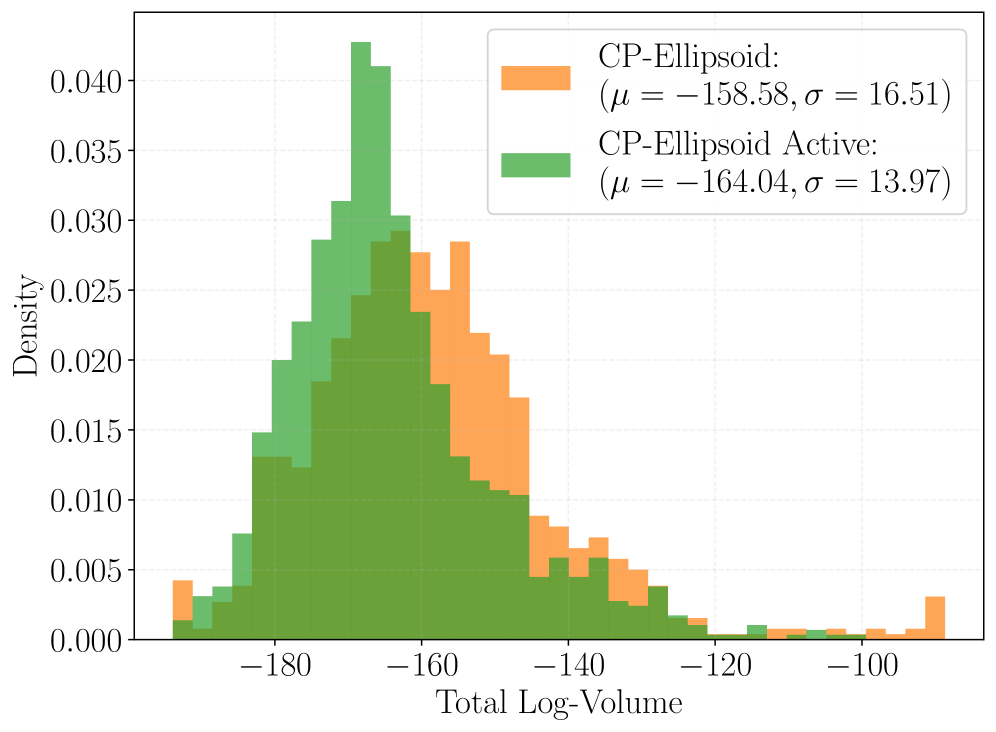
关键设计:论文中,加权CP使用学习到的状态-控制相关的协方差模型来提高预测精度。SLS框架利用线性矩阵不等式(LMI)来求解鲁棒MPC问题,并采用体积优化的前向可达集来减小保守性。此外,论文还提供了关于覆盖率和鲁棒性的理论保证,并分析了数据密度和轨迹管大小对预测覆盖率的影响。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在4D汽车和12D四旋翼飞行器等非线性系统上,与固定边界和非鲁棒基线相比,显著提高了安全性和鲁棒性,尤其是在数据分布之外。例如,在四旋翼飞行器实验中,该方法能够安全地完成飞行任务,而其他方法则可能导致碰撞或不稳定。
🎯 应用场景
该研究成果可应用于自动驾驶、机器人导航、航空航天等领域,尤其是在环境复杂、模型不确定性高的场景下。例如,在自动驾驶中,可以利用该方法提高车辆在未知环境下的安全性和鲁棒性;在机器人导航中,可以帮助机器人在复杂环境中安全地规划路径。该方法具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
We present a novel framework for robust out-of-distribution planning and control using conformal prediction (CP) and system level synthesis (SLS), addressing the challenge of ensuring safety and robustness when using learned dynamics models beyond the training data distribution. We first derive high-confidence model error bounds using weighted CP with a learned, state-control-dependent covariance model. These bounds are integrated into an SLS-based robust nonlinear model predictive control (MPC) formulation, which performs constraint tightening over the prediction horizon via volume-optimized forward reachable sets. We provide theoretical guarantees on coverage and robustness under distributional drift, and analyze the impact of data density and trajectory tube size on prediction coverage. Empirically, we demonstrate our method on nonlinear systems of increasing complexity, including a 4D car and a {12D} quadcopter, improving safety and robustness compared to fixed-bound and non-robust baselines, especially outside of the data distribution.