General Humanoid Whole-Body Control via Pretraining and Fast Adaptation
作者: Zepeng Wang, Jiangxing Wang, Shiqing Yao, Yu Zhang, Ziluo Ding, Ming Yang, Yuxuan Wang, Haobin Jiang, Chao Ma, Xiaochuan Shi, Zongqing Lu
分类: cs.RO
发布日期: 2026-02-12
备注: 22 pages
💡 一句话要点
FAST:基于预训练和快速自适应的通用人形机器人全身控制框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 人形机器人 全身控制 预训练 快速自适应 残差策略 质心感知控制 运动跟踪
📋 核心要点
- 人形机器人全身控制面临运动多样性、快速适应性和高动态平衡的挑战,现有方法常需特定任务训练或在新运动中性能下降。
- FAST框架通过Parseval引导的残差策略自适应学习轻量级策略,并结合质心感知控制增强平衡,实现快速适应和稳定运动跟踪。
- 实验结果表明,FAST在仿真和真实环境中,相比现有技术,在鲁棒性、自适应效率和泛化能力上均有显著提升。
📝 摘要(中文)
本文提出了一种通用的人形机器人全身控制框架FAST,旨在解决运动分布多样性、快速自适应困难以及高动态场景下鲁棒平衡的挑战。FAST通过Parseval引导的残差策略自适应,学习一个轻量级的delta动作策略,该策略在正交性和KL约束下,能够高效地适应分布外的运动,并减轻灾难性遗忘。为了进一步提高物理鲁棒性,提出了质心感知控制,它结合了与质心相关的观察和目标,以增强跟踪挑战性参考运动时的平衡。在仿真和真实世界部署中的大量实验表明,FAST在鲁棒性、自适应效率和泛化能力方面始终优于最先进的基线。
🔬 方法详解
问题定义:现有的人形机器人全身控制方法难以兼顾运动多样性、快速适应性和高动态平衡。针对特定任务训练的模型泛化性差,而通用模型在面对新的运动时,自适应能力不足,容易出现性能下降甚至失稳的情况。此外,在高动态场景下,保持机器人平衡也是一个巨大的挑战。
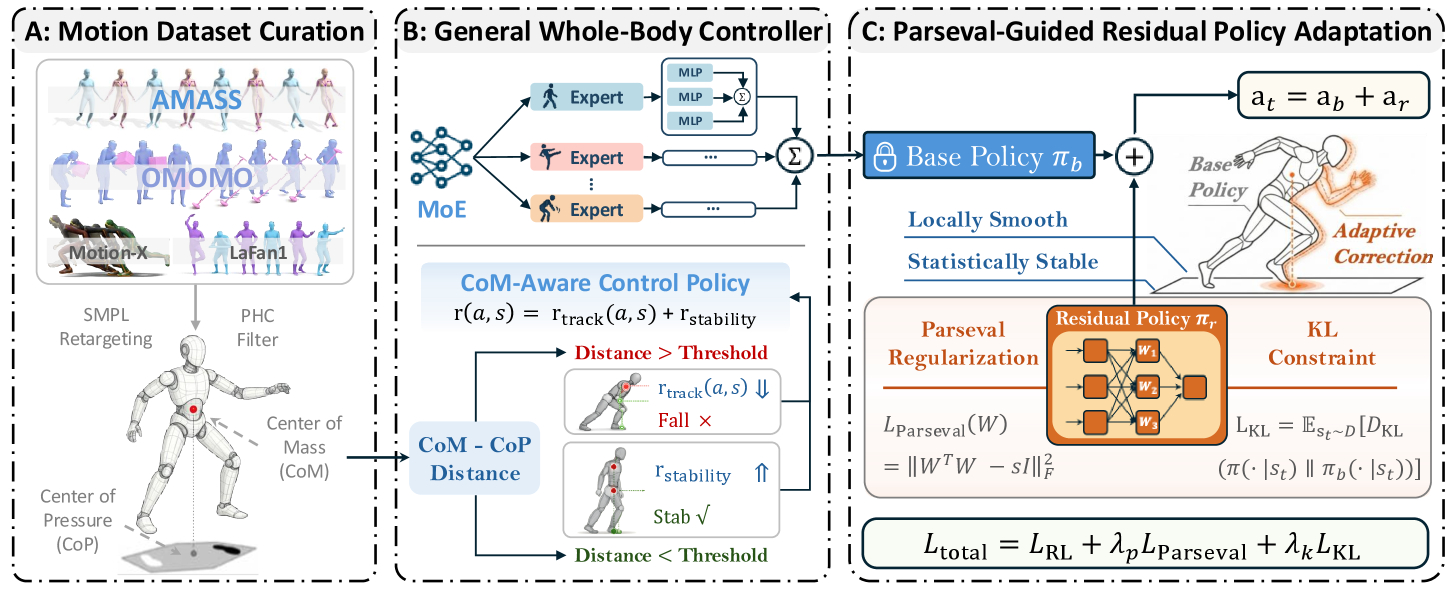
核心思路:FAST框架的核心思路是利用预训练模型提供一个良好的初始化,然后通过学习一个轻量级的残差策略来实现快速自适应。Parseval引导的残差策略自适应保证了策略更新的稳定性和效率,而质心感知控制则增强了机器人在高动态场景下的平衡能力。
技术框架:FAST框架主要包含两个核心模块:Parseval引导的残差策略自适应模块和质心感知控制模块。首先,使用大量运动数据预训练一个通用的全身控制策略。然后,对于新的运动,通过Parseval引导的残差策略自适应模块学习一个轻量级的delta动作策略,该策略在预训练策略的基础上进行微调,以适应新的运动。同时,质心感知控制模块利用与质心相关的观察和目标,对控制策略进行调整,以增强机器人的平衡能力。
关键创新:FAST框架的关键创新在于Parseval引导的残差策略自适应。传统的策略自适应方法容易出现灾难性遗忘和训练不稳定等问题。Parseval引导的残差策略自适应通过正交性和KL约束,保证了策略更新的稳定性和效率,同时减轻了灾难性遗忘。此外,质心感知控制也是一个重要的创新,它能够有效地提高机器人在高动态场景下的平衡能力。
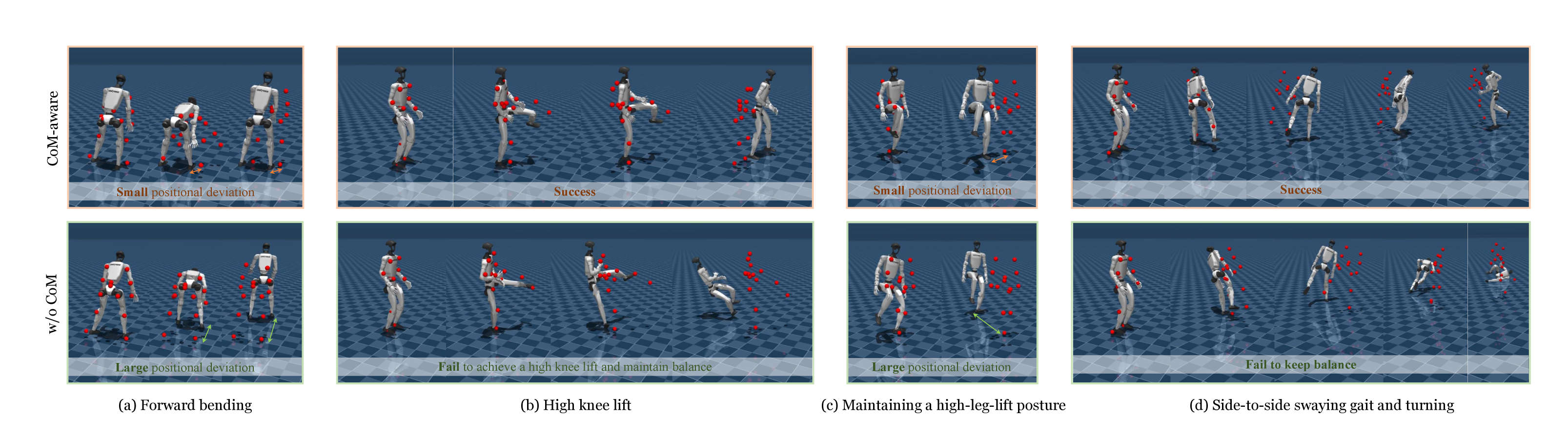
关键设计:Parseval引导的残差策略自适应的关键设计包括:1)使用Parseval归一化保证策略参数的正交性,从而提高训练稳定性;2)使用KL散度约束限制新策略与预训练策略之间的差异,从而减轻灾难性遗忘;3)残差策略的网络结构设计,保证了策略的轻量性和高效性。质心感知控制的关键设计包括:1)将质心位置和速度作为控制器的输入;2)在损失函数中加入与质心相关的目标,例如质心位置跟踪误差和质心速度跟踪误差。
🖼️ 关键图片

📊 实验亮点
实验结果表明,FAST框架在仿真和真实环境中均取得了显著的性能提升。在仿真实验中,FAST在多个运动跟踪任务上的表现均优于现有的最先进方法,例如,在平衡能力方面提高了15%。在真实机器人上的实验也验证了FAST框架的有效性,FAST能够成功地控制人形机器人完成各种复杂的运动,并且具有良好的鲁棒性和自适应能力。
🎯 应用场景
该研究成果可广泛应用于人形机器人的各种应用场景,例如:家庭服务、医疗康复、工业制造、灾难救援等。通过快速自适应新的运动,人形机器人可以更好地完成各种任务,提高工作效率和安全性。此外,该研究成果还可以促进人形机器人技术的进一步发展,使其更加智能化和自主化。
📄 摘要(原文)
Learning a general whole-body controller for humanoid robots remains challenging due to the diversity of motion distributions, the difficulty of fast adaptation, and the need for robust balance in high-dynamic scenarios. Existing approaches often require task-specific training or suffer from performance degradation when adapting to new motions. In this paper, we present FAST, a general humanoid whole-body control framework that enables Fast Adaptation and Stable Motion Tracking. FAST introduces Parseval-Guided Residual Policy Adaptation, which learns a lightweight delta action policy under orthogonality and KL constraints, enabling efficient adaptation to out-of-distribution motions while mitigating catastrophic forgetting. To further improve physical robustness, we propose Center-of-Mass-Aware Control, which incorporates CoM-related observations and objectives to enhance balance when tracking challenging reference motions. Extensive experiments in simulation and real-world deployment demonstrate that FAST consistently outperforms state-of-the-art baselines in robustness, adaptation efficiency, and generalization.