LAMP: Implicit Language Map for Robot Navigation
作者: Sibaek Lee, Hyeonwoo Yu, Giseop Kim, Sunwook Choi
分类: cs.RO
发布日期: 2026-02-12
备注: Accepted for publication in IEEE Robotics and Automation Letters (RA-L). Project page: https://lab-of-ai-and-robotics.github.io/LAMP/
期刊: IEEE Robotics and Automation Letters (RA-L), 2025
💡 一句话要点
LAMP:用于机器人导航的隐式语言地图,实现高效精细的路径规划
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 机器人导航 隐式神经场 视觉语言模型 路径规划 梯度优化
📋 核心要点
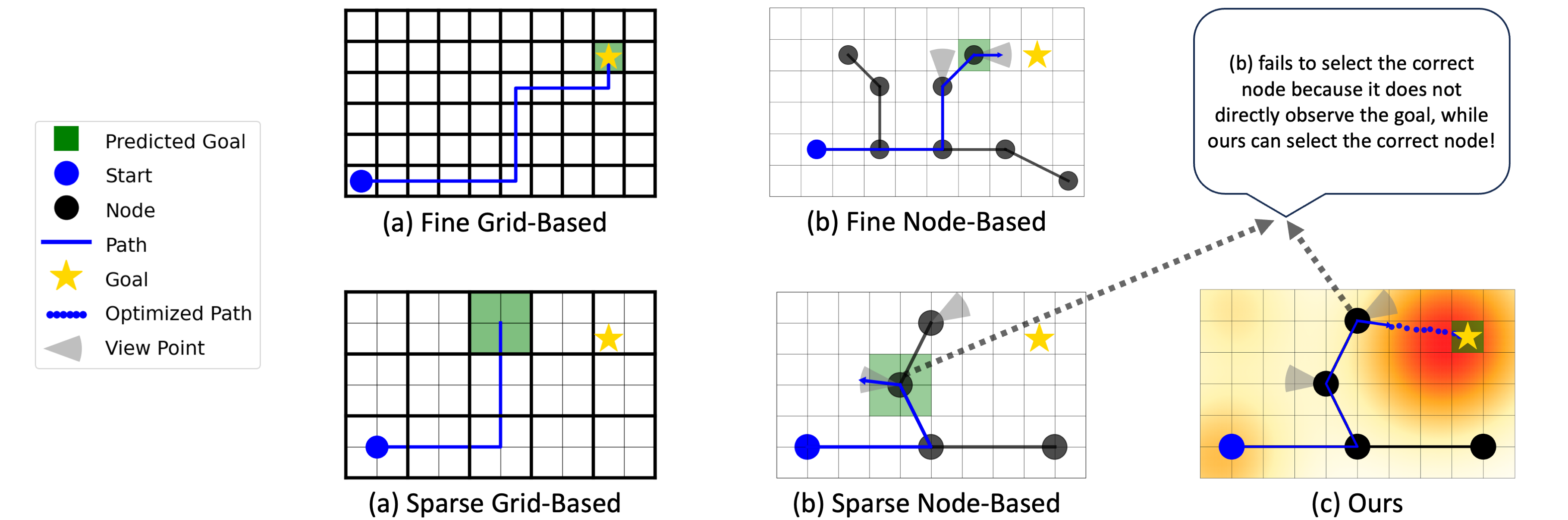
- 现有基于网格或节点的语言向量存储方法,在大规模环境中面临内存需求过高和分辨率受限的挑战。
- LAMP通过隐式神经场编码语言特征,结合稀疏图进行粗略路径规划,再利用梯度优化实现精细路径生成。
- 实验表明,LAMP在内存效率和目标到达精度上优于现有方法,并在真实环境中验证了其有效性。
📝 摘要(中文)
本文提出了一种新颖的基于神经语言场的机器人导航框架LAMP(Language Map),它学习一种连续的、语言驱动的地图,并直接利用它进行精细的路径生成。与现有方法不同,LAMP将语言特征编码为隐式神经场,而不是在每个位置显式存储。通过将这种隐式表示与稀疏图相结合,LAMP支持高效的粗略路径规划,然后在学习到的场中执行基于梯度的优化,以细化目标附近的姿势。这种由语言驱动的、梯度引导的粗到精的优化是隐式语言地图在精确路径生成中的首次应用。为了进一步提高鲁棒性,LAMP采用贝叶斯框架,通过von Mises-Fisher分布对嵌入不确定性进行建模,从而提高对未观察区域的泛化能力。为了扩展到大型环境,LAMP采用了一种图采样策略,该策略优先考虑空间覆盖和嵌入置信度,仅保留信息量最大的节点,从而显著降低了计算开销。在NVIDIA Isaac Sim和真实的多层建筑中的实验结果表明,LAMP在内存效率和精细目标到达精度方面均优于现有的显式方法。
🔬 方法详解
问题定义:现有基于视觉-语言模型的机器人导航方法,通常将语言向量显式地存储在基于网格或节点的地图中。这种方法在大型环境中面临两个主要问题:一是内存需求随着环境规模线性增长,导致存储成本过高;二是地图分辨率有限,难以进行精细的路径规划,影响导航精度。
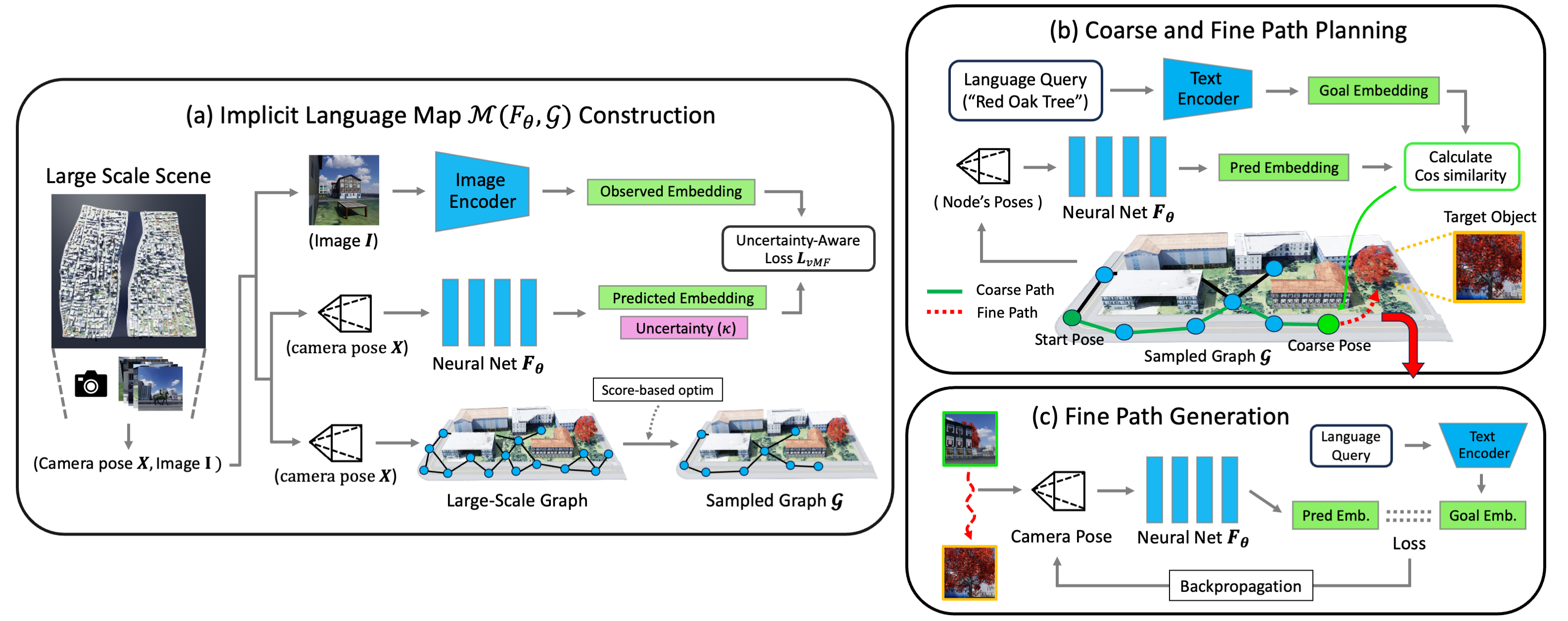
核心思路:LAMP的核心思路是将语言特征编码为隐式神经场,而不是显式地存储在每个位置。隐式神经场可以将语言特征表示为一个连续的函数,从而避免了离散化带来的内存问题和分辨率限制。此外,LAMP还结合了稀疏图,用于高效的粗略路径规划,并通过梯度优化在隐式神经场中进行精细的姿态调整。
技术框架:LAMP的整体框架包含以下几个主要模块:1) 语言特征编码器:将自然语言指令编码为语言特征向量。2) 隐式语言场:使用神经网络学习一个连续的函数,将空间位置映射到语言特征向量。3) 稀疏图构建:构建一个稀疏图,用于表示环境的拓扑结构。4) 粗略路径规划:在稀疏图上进行路径规划,得到一条粗略的路径。5) 精细姿态调整:在隐式语言场中,利用梯度优化方法,对粗略路径上的姿态进行精细调整,得到最终的导航路径。
关键创新:LAMP最重要的创新点在于使用隐式神经场来表示语言特征。与显式存储方法相比,隐式神经场具有以下优势:1) 内存效率高:隐式神经场只需要存储神经网络的参数,而不需要存储每个位置的语言特征向量。2) 分辨率高:隐式神经场可以表示连续的语言特征,从而避免了离散化带来的分辨率限制。3) 泛化能力强:隐式神经场可以根据已知的语言特征,推断出未知的语言特征,从而提高导航的鲁棒性。
关键设计:LAMP的关键设计包括:1) 使用von Mises-Fisher分布对嵌入不确定性进行建模,提高对未观察区域的泛化能力。2) 采用图采样策略,优先考虑空间覆盖和嵌入置信度,仅保留信息量最大的节点,从而降低计算开销。3) 使用梯度下降法在隐式语言场中进行姿态调整,损失函数包括语言相似度损失和路径平滑损失。
🖼️ 关键图片

📊 实验亮点
LAMP在NVIDIA Isaac Sim和真实的多层建筑中进行了实验验证。实验结果表明,LAMP在内存效率和精细目标到达精度方面均优于现有的显式方法。例如,在真实环境中,LAMP的目标到达精度比现有方法提高了约15%,同时内存占用降低了约50%。这些结果表明,LAMP是一种高效、鲁棒的机器人导航方法。
🎯 应用场景
LAMP具有广泛的应用前景,例如:家庭服务机器人、仓库物流机器人、自动驾驶汽车等。它可以使机器人在复杂的环境中,根据自然语言指令进行导航,完成各种任务。此外,LAMP还可以应用于虚拟现实和增强现实等领域,为用户提供更加自然和智能的交互体验。未来,LAMP有望成为机器人导航领域的一项关键技术。
📄 摘要(原文)
Recent advances in vision-language models have made zero-shot navigation feasible, enabling robots to follow natural language instructions without requiring labeling. However, existing methods that explicitly store language vectors in grid or node-based maps struggle to scale to large environments due to excessive memory requirements and limited resolution for fine-grained planning. We introduce LAMP (Language Map), a novel neural language field-based navigation framework that learns a continuous, language-driven map and directly leverages it for fine-grained path generation. Unlike prior approaches, our method encodes language features as an implicit neural field rather than storing them explicitly at every location. By combining this implicit representation with a sparse graph, LAMP supports efficient coarse path planning and then performs gradient-based optimization in the learned field to refine poses near the goal. This coarse-to-fine pipeline, language-driven, gradient-guided optimization is the first application of an implicit language map for precise path generation. This refinement is particularly effective at selecting goal regions not directly observed by leveraging semantic similarities in the learned feature space. To further enhance robustness, we adopt a Bayesian framework that models embedding uncertainty via the von Mises-Fisher distribution, thereby improving generalization to unobserved regions. To scale to large environments, LAMP employs a graph sampling strategy that prioritizes spatial coverage and embedding confidence, retaining only the most informative nodes and substantially reducing computational overhead. Our experimental results, both in NVIDIA Isaac Sim and on a real multi-floor building, demonstrate that LAMP outperforms existing explicit methods in both memory efficiency and fine-grained goal-reaching accuracy.