YOR: Your Own Mobile Manipulator for Generalizable Robotics
作者: Manan H Anjaria, Mehmet Enes Erciyes, Vedant Ghatnekar, Neha Navarkar, Haritheja Etukuru, Xiaole Jiang, Kanad Patel, Dhawal Kabra, Nicholas Wojno, Radhika Ajay Prayage, Soumith Chintala, Lerrel Pinto, Nur Muhammad Mahi Shafiullah, Zichen Jeff Cui
分类: cs.RO, cs.LG
发布日期: 2026-02-11
💡 一句话要点
YOR:一款低成本、开源的通用移动操作机器人平台
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 移动操作机器人 开源机器人 低成本机器人 机器人平台 双臂机器人
📋 核心要点
- 现有移动操作机器人平台成本高昂,限制了相关研究的普及和发展。
- YOR通过模块化设计和现成组件,构建了一个低成本、开源的移动操作机器人平台。
- 实验证明,YOR能够完成需要全身协调控制、双臂操作和自主导航的复杂任务。
📝 摘要(中文)
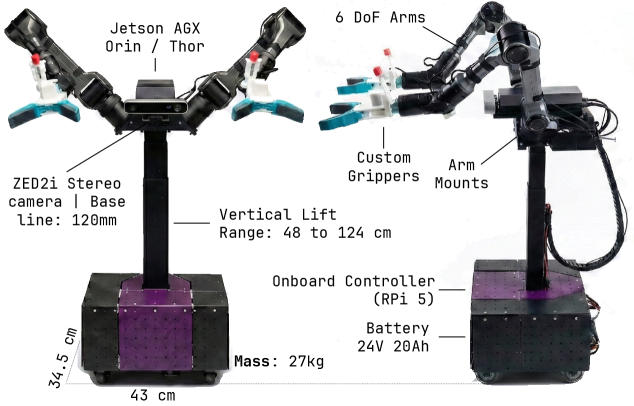
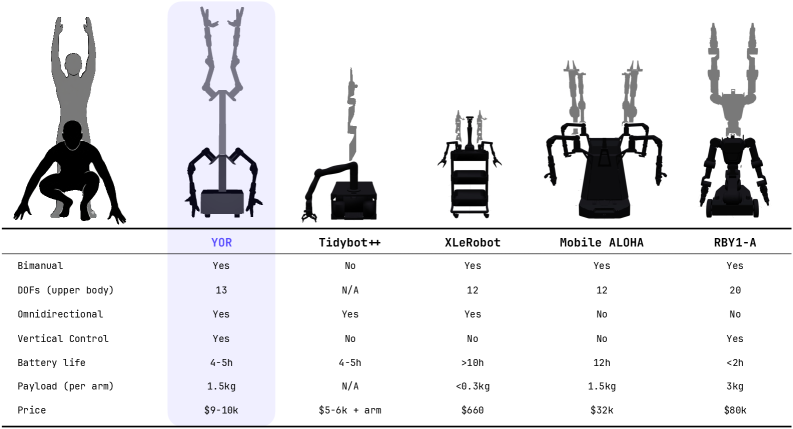
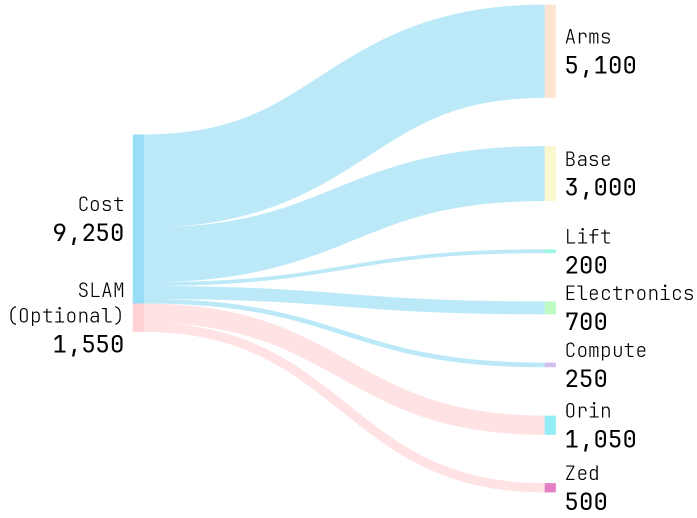
本文介绍了一种名为YOR的开源、低成本移动操作机器人,旨在为通用机器人研究提供一个经济实用的平台。YOR集成了全向移动底盘、伸缩式垂直升降机构以及配备夹持器的双臂,实现了全身移动和操作能力。该设计强调模块化、易于使用现成组件组装以及经济性,材料清单成本低于1万美元。通过完成需要协调的全身控制、双臂操作和自主导航的任务,验证了YOR的能力。总体而言,YOR以远低于现有平台的价格,为移动操作研究提供了具有竞争力的功能。
🔬 方法详解
问题定义:现有移动操作机器人平台价格昂贵,阻碍了机器人学习和通用机器人研究的进展。缺乏低成本、高性能的平台,使得研究人员难以进行大规模实验和算法验证。现有平台在模块化、易用性和可扩展性方面也存在不足。
核心思路:YOR的核心思路是利用现成的、低成本的组件,通过巧妙的机械设计和模块化组装,构建一个功能强大的移动操作机器人。通过优化结构设计,降低了对高精度、昂贵传感器的依赖,从而降低了整体成本。
技术框架:YOR的整体架构包括三个主要模块:全向移动底盘、伸缩式垂直升降机构和双臂操作机构。全向移动底盘提供灵活的移动能力,伸缩式升降机构扩展了机器人的工作空间,双臂操作机构则实现了复杂的物体操作。这些模块通过标准接口连接,易于组装和维护。软件方面,YOR采用ROS作为机器人操作系统,方便集成各种算法和传感器。
关键创新:YOR的关键创新在于其低成本和开源的设计理念。通过精心的结构设计和组件选择,YOR在保证性能的同时,显著降低了成本。开源的设计鼓励社区参与,促进了平台的改进和功能的扩展。此外,YOR的模块化设计也使其易于定制和升级,满足不同研究需求。
关键设计:YOR的关键设计包括:1) 采用麦克纳姆轮的全向移动底盘,实现灵活的移动;2) 使用线性致动器的伸缩式升降机构,提供垂直方向的运动范围;3) 配备夹持器的双臂操作机构,实现物体抓取和操作。材料清单成本控制在1万美元以下。具体参数设置和网络结构等技术细节未在摘要中详细说明,属于未知信息。
🖼️ 关键图片
📊 实验亮点
YOR通过实验验证了其在全身协调控制、双臂操作和自主导航方面的能力。虽然摘要中没有提供具体的性能数据和对比基线,但强调了YOR以远低于现有平台的价格,提供了具有竞争力的功能,这本身就是一个重要的实验亮点。
🎯 应用场景
YOR可应用于家庭服务、物流仓储、医疗辅助等领域。其低成本和开源特性使其成为教育和研究的理想平台,促进机器人技术的普及和发展。未来,YOR有望成为通用机器人研究的重要工具,加速机器人从实验室走向实际应用。
📄 摘要(原文)
Recent advances in robot learning have generated significant interest in capable platforms that may eventually approach human-level competence. This interest, combined with the commoditization of actuators, has propelled growth in low-cost robotic platforms. However, the optimal form factor for mobile manipulation, especially on a budget, remains an open question. We introduce YOR, an open-source, low-cost mobile manipulator that integrates an omnidirectional base, a telescopic vertical lift, and two arms with grippers to achieve whole-body mobility and manipulation. Our design emphasizes modularity, ease of assembly using off-the-shelf components, and affordability, with a bill-of-materials cost under 10,000 USD. We demonstrate YOR's capability by completing tasks that require coordinated whole-body control, bimanual manipulation, and autonomous navigation. Overall, YOR offers competitive functionality for mobile manipulation research at a fraction of the cost of existing platforms. Project website: https://www.yourownrobot.ai/