Omnidirectional Dual-Arm Aerial Manipulator with Proprioceptive Contact Localization for Landing on Slanted Roofs
作者: Martijn B. J. Brummelhuis, Nathan F. Lepora, Salua Hamaza
分类: cs.RO
发布日期: 2026-02-11
备注: Accepted into 2026 International Conference on Robotics and Automation (ICRA) in Vienna
💡 一句话要点
提出基于力矩观测器的双臂无人机,用于在倾斜屋顶上自主着陆
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 无人机 双臂机器人 自主着陆 力矩观测器 本体感受 倾斜角度估计 接触定位
📋 核心要点
- 传统无人机在城市复杂屋顶着陆时,依赖视觉或声学传感器易受环境因素干扰,导致倾斜角度检测不准确。
- 论文提出一种双臂无人机,通过力矩观测器进行本体感受接触检测和定位,从而无需视觉即可感知屋顶倾斜度。
- 实验表明,该方法能够在高达30.5度的倾斜表面上稳定着陆,倾斜角度估计误差平均为2.87度。
📝 摘要(中文)
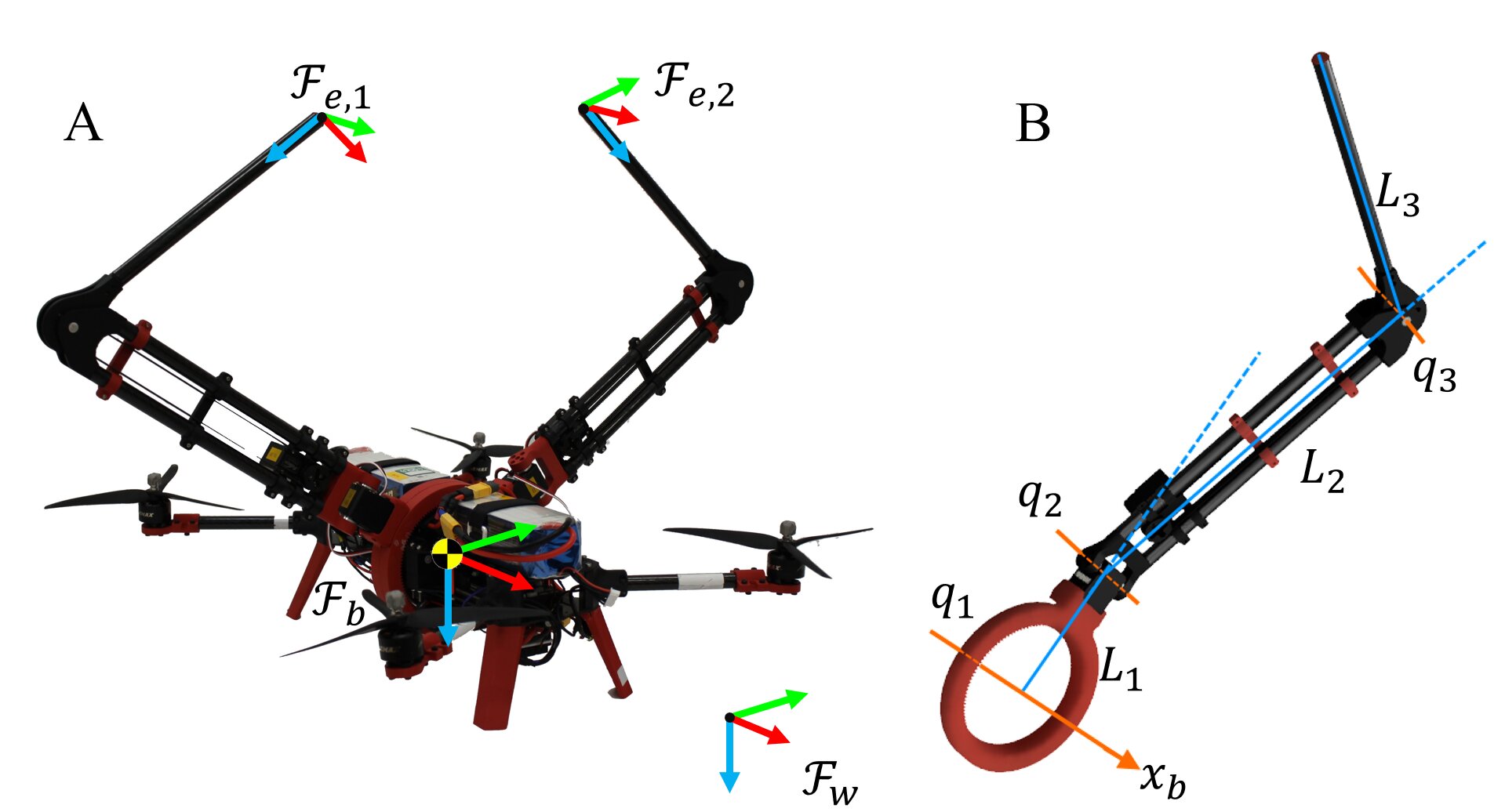
本文提出了一种新型无人机操控器形态,该形态具有全向3D工作空间和扩展的触及范围,即双臂无人机操控器。为了克服传统视觉或声学方法在城市环境中无人机在屋顶着陆时,因天气条件和表面材料等外部因素影响而导致的屋顶倾斜角度检测不准确的问题,本文基于动量力矩观测器,开发了一种本体感受接触检测和定位策略。这使得无人机能够在着陆前,通过物理交互“盲目地”推断倾斜表面的倾斜度。飞行实验验证了该方法,证明了其在倾斜高达30.5度的表面上稳健着陆的能力,并在不同倾斜角度的9次实验中实现了平均2.87度的表面倾斜度估计误差。
🔬 方法详解
问题定义:无人机在城市环境中着陆时,需要准确估计屋顶的倾斜角度。传统的视觉或声学方法容易受到光照、天气、材料等因素的影响,导致测量结果不准确,从而影响着陆的稳定性和安全性。因此,需要一种鲁棒的、不依赖外部环境信息的倾斜角度估计方法。
核心思路:论文的核心思路是利用无人机的双臂与屋顶进行物理接触,通过测量接触过程中产生的力矩信息,反推出屋顶的倾斜角度。这种方法基于本体感受,不依赖外部传感器,因此更加鲁棒。
技术框架:该方法主要包含以下几个步骤:1) 双臂无人机与屋顶接触;2) 通过动量力矩观测器估计接触力矩;3) 基于接触力矩信息,计算屋顶的倾斜角度;4) 调整无人机的姿态,实现稳定着陆。整体架构是一个闭环控制系统,通过不断调整无人机的姿态,使其与屋顶表面保持平行。
关键创新:该方法最重要的创新点在于利用动量力矩观测器进行本体感受接触检测和定位。传统的力矩观测器通常用于估计外部干扰力矩,而本文将其应用于估计接触力矩,从而实现了无需外部传感器即可感知环境信息的功能。
关键设计:动量力矩观测器的设计是关键。论文中具体如何设计该观测器,以及如何从观测到的力矩信息中提取出屋顶倾斜角度的信息,这些细节在论文中应该有详细描述(具体细节未知)。此外,无人机的控制算法也至关重要,需要保证无人机在接触过程中能够保持稳定,并能够根据估计的倾斜角度调整姿态(具体算法未知)。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法能够在高达30.5度的倾斜表面上实现稳健着陆,并且倾斜角度估计的平均误差仅为2.87度。这些结果验证了该方法在复杂环境下的有效性和鲁棒性。与传统的基于视觉或声学传感器的方法相比,该方法无需依赖外部环境信息,因此更加可靠。
🎯 应用场景
该研究成果可应用于城市环境中无人机的自主着陆,例如在建筑物屋顶进行包裹投递、设备检修、环境监测等任务。该方法提高了无人机在复杂环境下的适应性和可靠性,降低了对外部环境的依赖,具有重要的实际应用价值和广阔的应用前景。未来,该技术还可以扩展到其他需要与环境进行物理交互的机器人应用中。
📄 摘要(原文)
Operating drones in urban environments often means they need to land on rooftops, which can have different geometries and surface irregularities. Accurately detecting roof inclination using conventional sensing methods, such as vision-based or acoustic techniques, can be unreliable, as measurement quality is strongly influenced by external factors including weather conditions and surface materials. To overcome these challenges, we propose a novel unmanned aerial manipulator morphology featuring a dual-arm aerial manipulator with an omnidirectional 3D workspace and extended reach. Building on this design, we develop a proprioceptive contact detection and contact localization strategy based on a momentum-based torque observer. This enables the UAM to infer the inclination of slanted surfaces blindly - through physical interaction - prior to touchdown. We validate the approach in flight experiments, demonstrating robust landings on surfaces with inclinations of up to 30.5 degrees and achieving an average surface inclination estimation error of 2.87 degrees over 9 experiments at different incline angles.