Morphogenetic Assembly and Adaptive Control for Heterogeneous Modular Robots
作者: Chongxi Meng, Da Zhao, Yifei Zhao, Minghao Zeng, Yanmin Zhou, Zhipeng Wang, Bin He
分类: cs.RO
发布日期: 2026-02-11
备注: Accepted by ICRA 2026
💡 一句话要点
针对异构模块化机器人,提出形态构建与自适应控制的闭环自动化框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱四:生成式动作 (Generative Motion) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 模块化机器人 异构机器人 形态构建 自适应控制 分层规划 模型预测控制 路径积分 GPU加速
📋 核心要点
- 现有异构模块化机器人重构面临大规模状态空间爆炸问题,难以实现高效规划。
- 提出分层规划器,将离散配置规划与连续运动执行解耦,并引入类型惩罚项提高规划鲁棒性。
- 采用GPU加速的退火方差MPPI控制器,实现配置无关的实时运动控制,并显著提升了控制频率和精度。
📝 摘要(中文)
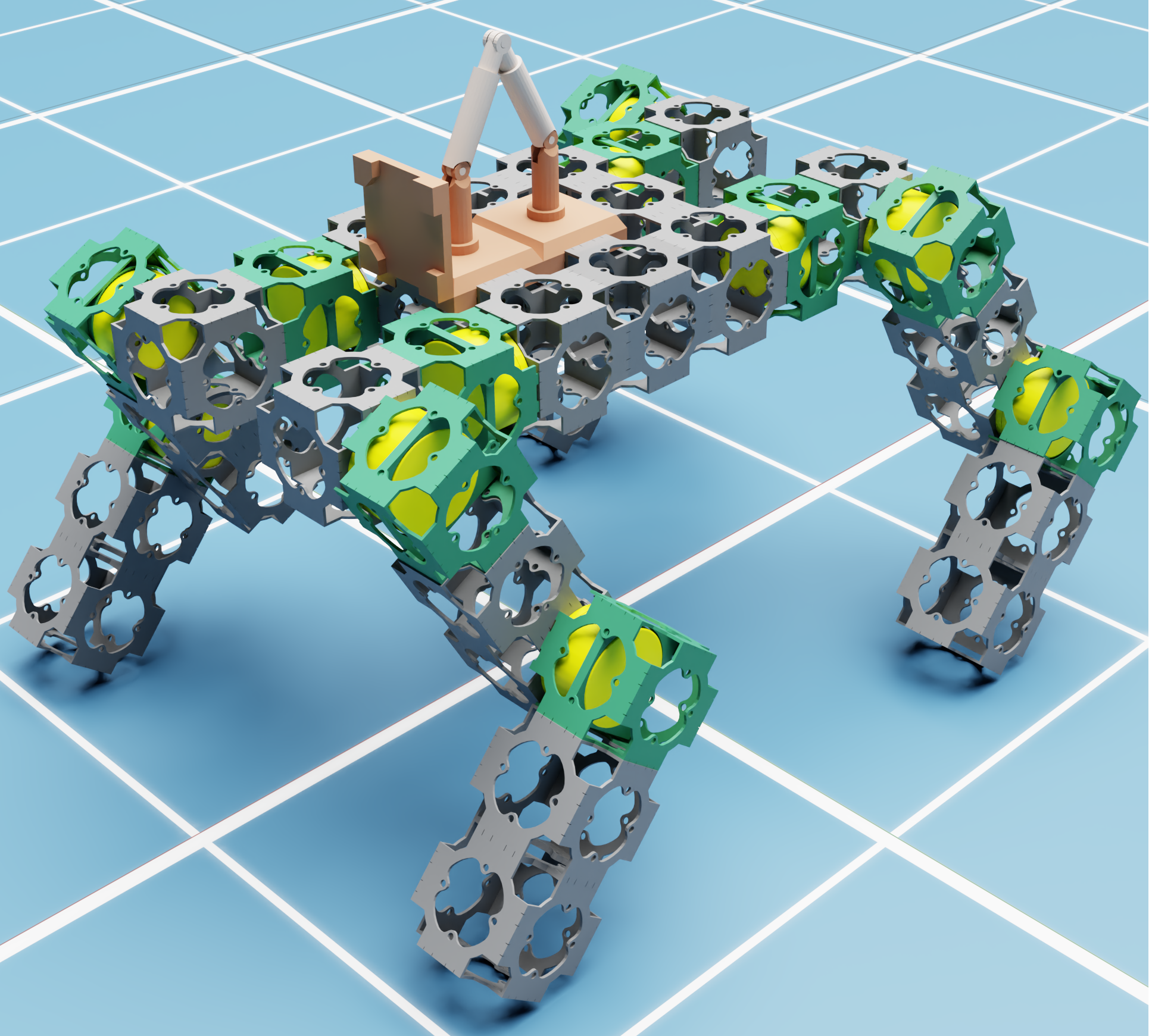
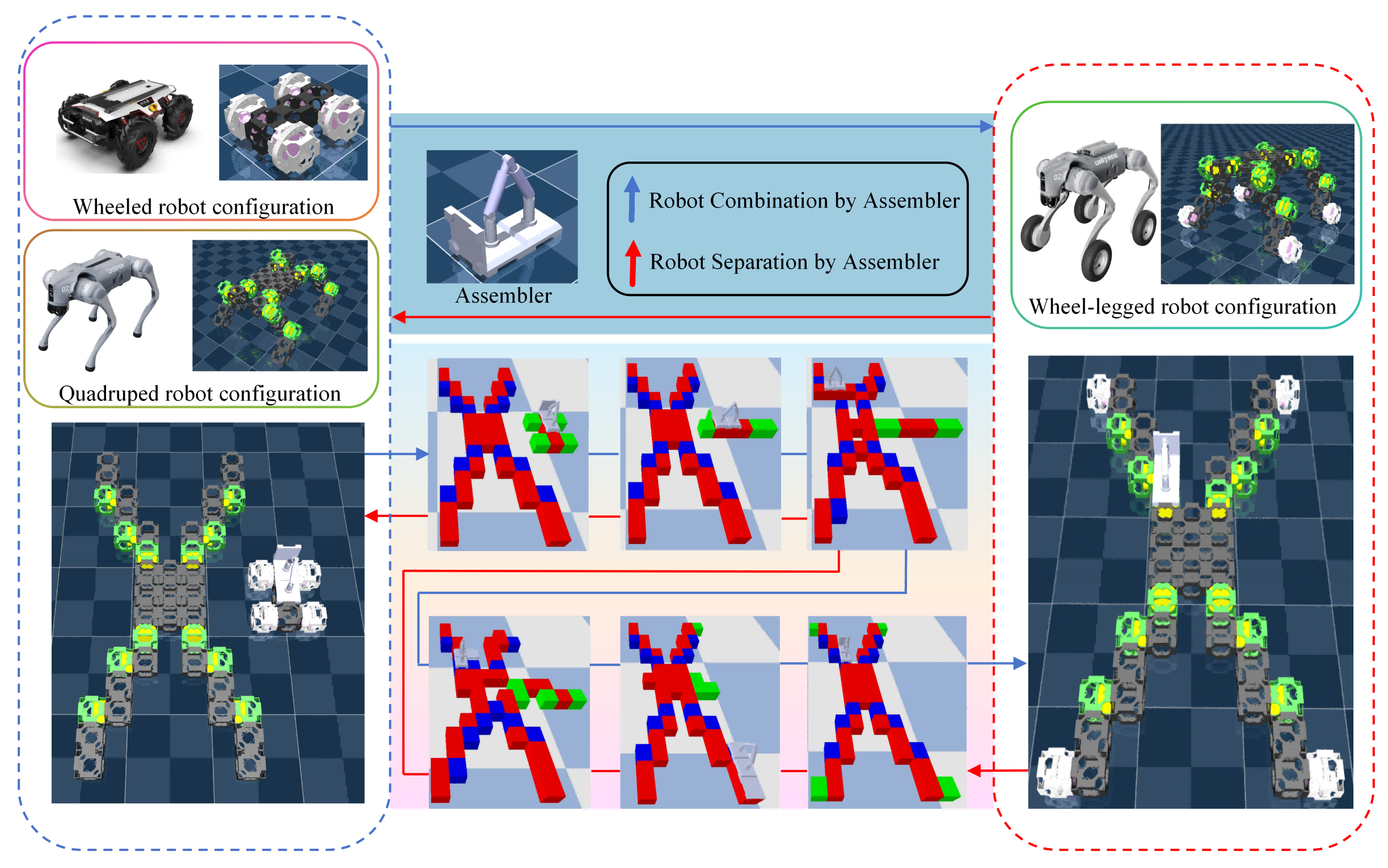
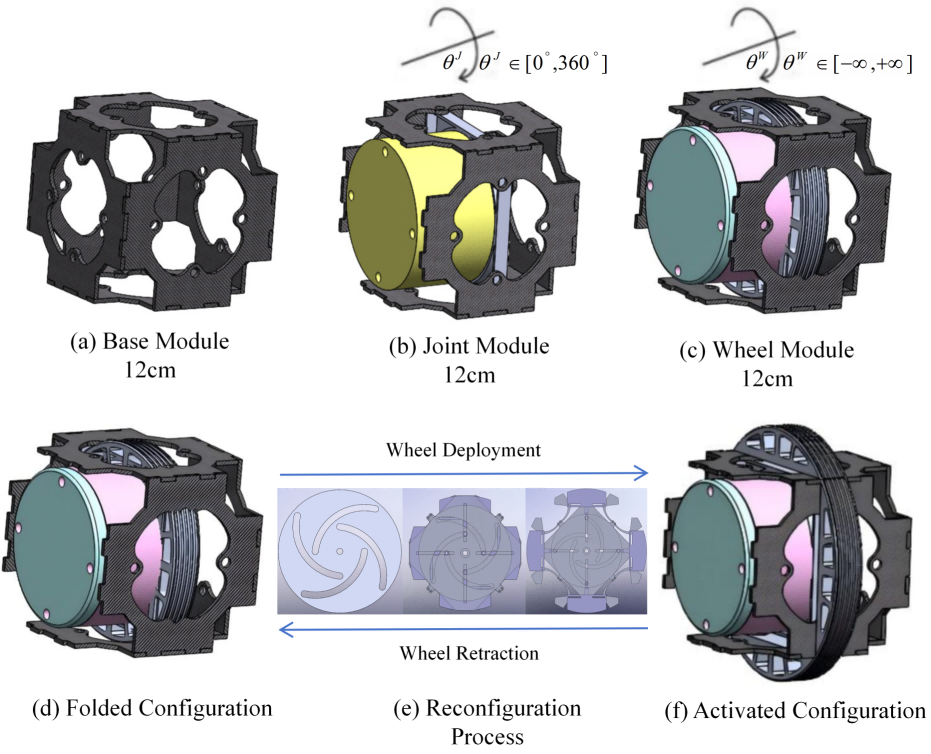
本文提出了一种针对异构模块化机器人的闭环自动化框架,涵盖了从形态构建到自适应控制的完整流程。在该框架中,移动机械臂操作异构功能模块(包括结构模块、关节模块和轮式模块),以动态组装不同的机器人配置,并使其具备即时移动能力。为了解决大规模异构重构中的状态空间爆炸问题,我们提出了一种分层规划器:高层规划器使用带有类型惩罚项的双向启发式搜索来生成模块处理序列,而低层规划器采用A*搜索来计算最优执行轨迹。这种设计有效地将离散配置规划与连续运动执行解耦。对于未知组装配置的自适应运动生成,我们引入了一种GPU加速的退火方差模型预测路径积分(MPPI)控制器。通过结合多阶段方差退火策略来平衡全局探索和局部收敛,该控制器实现了与配置无关的实时运动控制。大规模仿真表明,类型惩罚项对于异构场景中的规划鲁棒性至关重要。此外,贪婪启发式算法产生的计划比匈牙利启发式算法具有更低的物理执行成本。所提出的退火方差MPPI在速度跟踪精度和控制频率方面均显著优于标准MPPI,实现了50 Hz的实时控制。该框架验证了包括模块组装、机器人合并和拆分以及动态运动生成在内的完整周期过程。
🔬 方法详解
问题定义:论文旨在解决异构模块化机器人的自动化构建和控制问题。现有方法在处理大规模异构模块化机器人时,由于状态空间呈指数级增长,导致规划效率低下,难以实现快速重构和自适应控制。此外,现有控制方法难以应对未知组装配置,缺乏通用性和实时性。
核心思路:论文的核心思路是将整个过程分解为模块组装规划和运动控制两个阶段,并分别采用不同的策略进行优化。通过分层规划器降低规划复杂度,利用GPU加速的MPPI控制器实现实时自适应控制。这种解耦的设计使得系统能够高效地处理大规模异构模块化机器人的重构和控制任务。
技术框架:该框架包含以下主要模块:1) 模块化机器人库,包含不同类型的模块(结构、关节、轮式等);2) 高层规划器,使用双向启发式搜索和类型惩罚项生成模块处理序列;3) 低层规划器,使用A*搜索计算最优执行轨迹;4) GPU加速的退火方差MPPI控制器,用于实时运动控制。整个流程从高层规划开始,生成组装序列,然后由低层规划器生成具体轨迹,最后由MPPI控制器执行运动。
关键创新:论文的关键创新在于:1) 提出了带有类型惩罚项的分层规划器,有效降低了异构模块化机器人重构的规划复杂度,提高了规划鲁棒性;2) 引入了GPU加速的退火方差MPPI控制器,实现了配置无关的实时运动控制,显著提升了控制性能。
关键设计:在高层规划中,类型惩罚项用于降低选择相同类型模块的概率,从而鼓励探索更多样化的配置。在MPPI控制器中,多阶段方差退火策略用于平衡全局探索和局部收敛,避免陷入局部最优。GPU加速则显著提升了MPPI控制器的计算速度,使其能够实现实时控制。
🖼️ 关键图片
📊 实验亮点
实验结果表明,类型惩罚项对于异构场景中的规划鲁棒性至关重要,贪婪启发式算法比匈牙利启发式算法具有更低的物理执行成本。所提出的退火方差MPPI控制器在速度跟踪精度和控制频率方面均显著优于标准MPPI,实现了50 Hz的实时控制,验证了框架的有效性。
🎯 应用场景
该研究成果可应用于自动化仓库、灾难救援、太空探索等领域。在自动化仓库中,机器人可以根据任务需求动态组装不同的配置,实现高效的物料搬运和分拣。在灾难救援中,机器人可以快速重构以适应复杂地形,执行搜索和救援任务。在太空探索中,模块化机器人可以根据环境变化进行自适应调整,完成各种科学考察任务。
📄 摘要(原文)
This paper presents a closed-loop automation framework for heterogeneous modular robots, covering the full pipeline from morphological construction to adaptive control. In this framework, a mobile manipulator handles heterogeneous functional modules including structural, joint, and wheeled modules to dynamically assemble diverse robot configurations and provide them with immediate locomotion capability. To address the state-space explosion in large-scale heterogeneous reconfiguration, we propose a hierarchical planner: the high-level planner uses a bidirectional heuristic search with type-penalty terms to generate module-handling sequences, while the low level planner employs A* search to compute optimal execution trajectories. This design effectively decouples discrete configuration planning from continuous motion execution. For adaptive motion generation of unknown assembled configurations, we introduce a GPU accelerated Annealing-Variance Model Predictive Path Integral (MPPI) controller. By incorporating a multi stage variance annealing strategy to balance global exploration and local convergence, the controller enables configuration-agnostic, real-time motion control. Large scale simulations show that the type-penalty term is critical for planning robustness in heterogeneous scenarios. Moreover, the greedy heuristic produces plans with lower physical execution costs than the Hungarian heuristic. The proposed annealing-variance MPPI significantly outperforms standard MPPI in both velocity tracking accuracy and control frequency, achieving real time control at 50 Hz. The framework validates the full-cycle process, including module assembly, robot merging and splitting, and dynamic motion generation.