RadarEye: Robust Liquid Level Tracking Using mmWave Radar in Robotic Pouring
作者: Hongyu Deng, He Chen
分类: eess.SP, cs.RO
发布日期: 2026-02-11
备注: To appear in IEEE ICASSP 2026
💡 一句话要点
RadarEye:利用毫米波雷达实现机器人倾倒中鲁棒的液位跟踪
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 毫米波雷达 液位跟踪 机器人倾倒 透明液体操作 波束成形 卡尔曼滤波
📋 核心要点
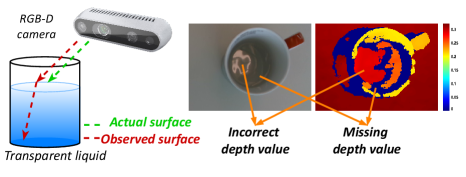
- 视觉方法在透明液体操作中易受镜面反射和光照变化影响,导致液位估计不准确。
- RadarEye利用毫米波雷达,通过高分辨率波束成形和物理信息跟踪,实现鲁棒的液位感知。
- 实验表明,RadarEye在液位跟踪精度和速度上显著优于视觉和超声波方法,误差仅为0.35厘米。
📝 摘要(中文)
在机器人倾倒中,透明液体的操作对感知系统来说仍然具有挑战性:镜面/折射效应和光照变化会降低视觉线索的质量,从而影响液位估计的可靠性。为了解决这个问题,我们提出了RadarEye,一个实时的毫米波雷达信号处理流程,用于在整个倾倒过程中实现鲁棒的液位估计和跟踪。RadarEye集成了(i)一个用于液位感应的高分辨率距离-角度波束成形模块,以及(ii)一个基于物理信息的倾倒中期跟踪器,该跟踪器抑制多径效应,从而在水流引起的杂波和源容器反射的情况下保持对液面的锁定。该流程提供亚毫秒级的延迟。在真实的机器人倒水实验中,RadarEye实现了0.35厘米的中值绝对高度误差,每次更新耗时0.62毫秒,大大优于视觉和超声波基线。
🔬 方法详解
问题定义:论文旨在解决机器人倾倒透明液体时,由于视觉线索受损而导致的液位估计不准确问题。现有方法,如视觉和超声波,在面对镜面反射、折射和光照变化时表现不佳,无法提供可靠的液位信息。
核心思路:论文的核心思路是利用毫米波雷达对液位进行感知,因为雷达信号不受光照条件和透明液体光学特性的影响。通过设计合适的信号处理流程,可以从雷达数据中提取出准确的液位信息,并进行实时跟踪。
技术框架:RadarEye的整体框架包含两个主要模块:高分辨率距离-角度波束成形模块和基于物理信息的倾倒中期跟踪器。首先,波束成形模块用于检测液位,生成距离-角度谱。然后,倾倒中期跟踪器利用物理模型预测液位变化,并抑制多径效应,从而在复杂环境中保持对液面的锁定。整个流程以亚毫秒级的延迟运行。
关键创新:RadarEye的关键创新在于将毫米波雷达应用于透明液体的液位跟踪,并设计了专门的信号处理流程来应对倾倒过程中的挑战。与传统的视觉方法相比,RadarEye具有更强的鲁棒性和更高的精度。此外,物理信息跟踪器的引入有效地抑制了多径效应,提高了跟踪的稳定性。
关键设计:高分辨率波束成形模块采用Capon波束形成算法,以提高距离和角度分辨率。倾倒中期跟踪器基于卡尔曼滤波,利用液体的物理模型(如重力加速度)预测液位变化。为了抑制多径效应,跟踪器采用了一种基于距离和角度信息的滤波方法,滤除来自容器壁和其他物体的反射信号。
🖼️ 关键图片


📊 实验亮点
RadarEye在真实机器人倒水实验中表现出色,实现了0.35厘米的中值绝对高度误差,每次更新耗时仅0.62毫秒。与视觉和超声波基线相比,RadarEye在精度和速度上均有显著提升。实验结果表明,RadarEye能够有效地应对倾倒过程中的各种挑战,如镜面反射、折射和多径效应,提供鲁棒的液位跟踪。
🎯 应用场景
该研究成果可广泛应用于需要精确液体操作的机器人应用中,例如实验室自动化、餐饮服务、化学品处理等。通过提供可靠的液位信息,RadarEye可以帮助机器人更安全、更高效地完成倾倒任务,减少液体浪费和溢出风险。未来,该技术有望扩展到其他类型的液体操作,如液体混合、分配和灌装。
📄 摘要(原文)
Transparent liquid manipulation in robotic pouring remains challenging for perception systems: specular/refraction effects and lighting variability degrade visual cues, undermining reliable level estimation. To address this challenge, we introduce RadarEye, a real-time mmWave radar signal processing pipeline for robust liquid level estimation and tracking during the whole pouring process. RadarEye integrates (i) a high-resolution range-angle beamforming module for liquid level sensing and (ii) a physics-informed mid-pour tracker that suppresses multipath to maintain lock on the liquid surface despite stream-induced clutter and source container reflections. The pipeline delivers sub-millisecond latency. In real-robot water-pouring experiments, RadarEye achieves a 0.35 cm median absolute height error at 0.62 ms per update, substantially outperforming vision and ultrasound baselines.