A Collision-Free Sway Damping Model Predictive Controller for Safe and Reactive Forestry Crane Navigation
作者: Marc-Philip Ecker, Christoph Fröhlich, Johannes Huemer, David Gruber, Bernhard Bischof, Tobias Glück, Wolfgang Kemmetmüller
分类: cs.RO
发布日期: 2026-02-10
备注: Accepted at ICRA 2026
💡 一句话要点
提出一种无碰撞摆动阻尼模型预测控制器以解决林业起重机导航问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 林业起重机 碰撞避免 摆动阻尼 实时环境适应 LiDAR技术 动态规划
📋 核心要点
- 现有方法通常将摆动阻尼与碰撞避免分开处理,导致在动态环境中难以同时满足两者需求。
- 本文提出的控制器将摆动阻尼与碰撞避免整合在一个模型预测控制框架中,利用实时环境映射进行适应。
- 实验结果表明,该控制器在真实林业起重机上实现了有效的摆动阻尼和障碍物避免,提升了操作安全性。
📝 摘要(中文)
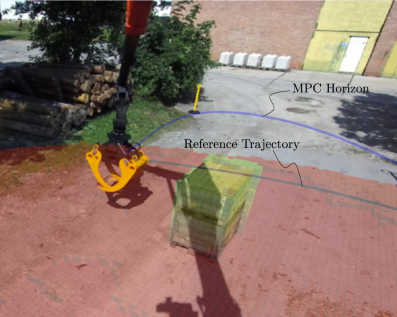
林业起重机在动态且非结构化的户外环境中操作,避免碰撞和控制负载摆动对于安全导航至关重要。现有方法通常将这两个挑战分开处理,或专注于预定义的无碰撞路径进行摆动阻尼,或仅在全局规划层面进行碰撞避免。本文首次提出了一种无碰撞、摆动阻尼的模型预测控制器(MPC),将两者目标统一在一个控制框架中。该方法通过在线欧几里得距离场(EDF)将基于LiDAR的环境映射直接集成到MPC中,实现实时环境适应。控制器在执行过程中同时强制碰撞约束并阻尼负载摆动,能够在环境变化时重新规划,保持在干扰下的无碰撞操作,并在没有绕行路径时提供安全停靠。对真实林业起重机的实验验证显示了有效的摆动阻尼和成功的障碍物避免。
🔬 方法详解
问题定义:本文旨在解决林业起重机在动态环境中同时进行摆动阻尼和碰撞避免的问题。现有方法往往将这两个目标分开处理,导致在实际应用中难以有效应对环境变化和干扰。
核心思路:本文提出的模型预测控制器(MPC)将摆动阻尼与碰撞避免整合在一个控制框架中,通过实时的环境映射实现动态适应。这种设计使得控制器能够在复杂环境中实时调整路径,确保安全操作。
技术框架:整体架构包括环境映射模块、模型预测控制模块和执行模块。环境映射模块使用LiDAR数据生成欧几里得距离场,MPC模块根据当前环境状态进行路径规划,执行模块则负责控制起重机的运动。
关键创新:本研究的核心创新在于首次将无碰撞路径规划与摆动阻尼结合在一个MPC框架中,克服了现有方法的局限性,实现了实时环境适应。
关键设计:控制器的设计包括实时更新的欧几里得距离场计算、碰撞约束的动态调整,以及摆动阻尼策略的优化。具体参数设置和损失函数设计在实验中经过调优,以确保控制效果的稳定性和安全性。
🖼️ 关键图片

📊 实验亮点
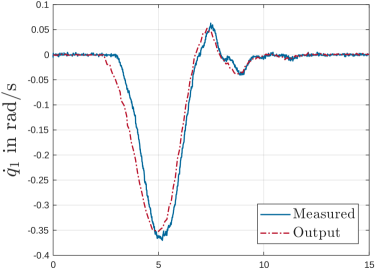
实验结果显示,提出的控制器在真实林业起重机上实现了有效的摆动阻尼,成功避免了障碍物。与传统方法相比,该控制器在动态环境中的响应速度和安全性显著提升,确保了无碰撞操作的可靠性。
🎯 应用场景
该研究的潜在应用领域包括林业、建筑和其他需要在复杂环境中进行精确操作的行业。通过提高林业起重机的安全性和操作效率,能够显著降低事故风险,提升生产力,具有重要的实际价值和未来影响。
📄 摘要(原文)
Forestry cranes operate in dynamic, unstructured outdoor environments where simultaneous collision avoidance and payload sway control are critical for safe navigation. Existing approaches address these challenges separately, either focusing on sway damping with predefined collision-free paths or performing collision avoidance only at the global planning level. We present the first collision-free, sway-damping model predictive controller (MPC) for a forestry crane that unifies both objectives in a single control framework. Our approach integrates LiDAR-based environment mapping directly into the MPC using online Euclidean distance fields (EDF), enabling real-time environmental adaptation. The controller simultaneously enforces collision constraints while damping payload sway, allowing it to (i) replan upon quasi-static environmental changes, (ii) maintain collision-free operation under disturbances, and (iii) provide safe stopping when no bypass exists. Experimental validation on a real forestry crane demonstrates effective sway damping and successful obstacle avoidance. A video can be found at https://youtu.be/tEXDoeLLTxA.