TaCo: A Benchmark for Lossless and Lossy Codecs of Heterogeneous Tactile Data
作者: Zhengxue Cheng, Yan Zhao, Keyu Wang, Hengdi Zhang, Li Song
分类: cs.RO, cs.AI
发布日期: 2026-02-10
备注: 27 pages
💡 一句话要点
TaCo:异构触觉数据编解码基准,提升机器人实时触觉感知能力
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 触觉数据压缩 机器人触觉感知 数据驱动编解码器 深度学习 基准测试
📋 核心要点
- 现有触觉数据压缩方法缺乏针对性和效率,难以满足实时机器人应用对带宽的严格要求。
- TaCo基准提出数据驱动的触觉数据编解码器TaCo-LL和TaCo-L,针对性地优化压缩性能。
- 实验表明,TaCo-LL和TaCo-L在无损和有损压缩方面均优于现有方法,提升了任务性能。
📝 摘要(中文)
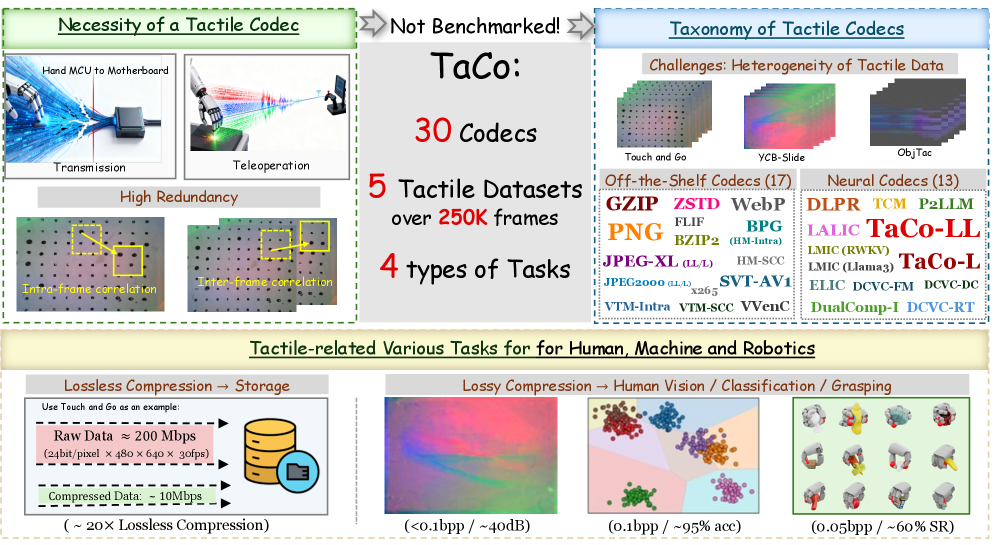
触觉感知对于具身智能至关重要,它能够在复杂环境中提供精细的感知和控制。然而,高效的触觉数据压缩对于带宽受限的实时机器人应用至关重要,但目前尚未得到充分探索。触觉数据固有的异构性和时空复杂性进一步加剧了这一挑战。为了弥合这一差距,我们推出了 TaCo,这是首个全面的触觉数据编解码基准。TaCo 在来自各种传感器类型的五个不同数据集上评估了 30 种压缩方法,包括现成的压缩算法和神经编解码器。我们系统地评估了四项关键任务中的无损和有损压缩方案:无损存储、人类可视化、材料和物体分类以及灵巧的机器人抓取。值得注意的是,我们率先开发了在触觉数据上显式训练的数据驱动编解码器 TaCo-LL(无损)和 TaCo-L(有损)。结果验证了我们的 TaCo-LL 和 TaCo-L 的卓越性能。该基准为理解压缩效率和任务性能之间的关键权衡提供了一个基础框架,为触觉感知领域的未来发展铺平了道路。
🔬 方法详解
问题定义:论文旨在解决触觉数据压缩效率低下的问题,特别是在带宽受限的机器人应用场景下。现有的通用压缩算法无法有效处理触觉数据的异构性和时空复杂性,导致压缩率低,影响实时性。此外,缺乏专门针对触觉数据的编解码器,以及统一的评估基准,阻碍了该领域的发展。
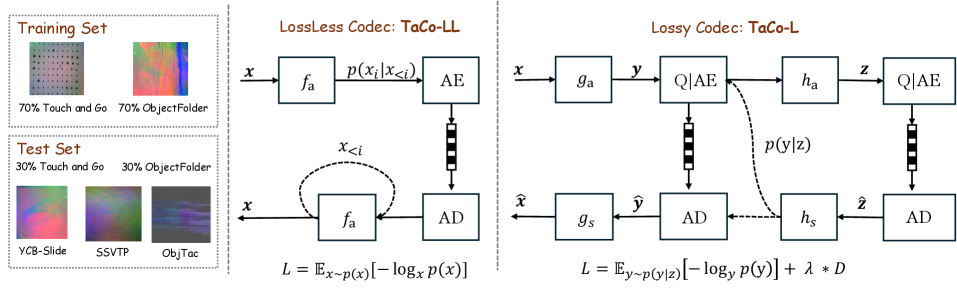
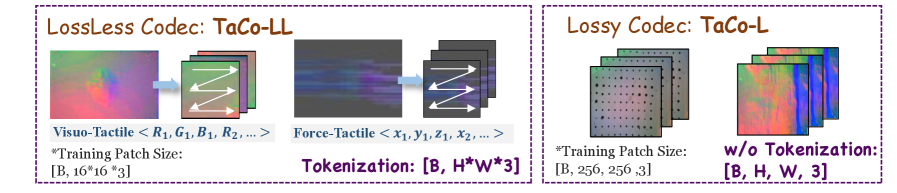
核心思路:论文的核心思路是设计数据驱动的触觉数据编解码器,利用深度学习技术学习触觉数据的内在结构和特征,从而实现更高的压缩率和更好的任务性能。通过在大量触觉数据上训练模型,使其能够自适应地优化压缩策略,以适应不同类型的触觉传感器和应用场景。
技术框架:TaCo基准包含五个主要部分:1) 多样化的触觉数据集,涵盖不同类型的传感器和应用场景;2) 30种压缩算法的实现,包括通用压缩算法和神经编解码器;3) 数据驱动的编解码器TaCo-LL和TaCo-L;4) 四个关键任务的评估指标,包括无损存储、人类可视化、材料和物体分类以及灵巧的机器人抓取;5) 统一的评估平台,用于比较不同压缩算法的性能。
关键创新:论文最重要的技术创新点在于提出了数据驱动的触觉数据编解码器TaCo-LL和TaCo-L。与传统的通用压缩算法相比,TaCo-LL和TaCo-L能够更好地利用触觉数据的特性,实现更高的压缩率和更好的任务性能。此外,TaCo基准的构建也为触觉数据压缩领域的研究提供了一个统一的评估平台。
关键设计:TaCo-LL和TaCo-L的具体网络结构未知,摘要中没有详细说明。但可以推测,其设计可能包括针对触觉数据特点的特殊层结构,例如卷积层用于提取空间特征,循环神经网络用于建模时间序列信息。损失函数的设计可能包括压缩率和任务性能的加权组合,以平衡两者之间的权衡。
🖼️ 关键图片
📊 实验亮点
实验结果表明,数据驱动的编解码器TaCo-LL和TaCo-L在多个触觉数据集和任务上均优于现有的压缩算法。具体性能提升数据未知,摘要中未给出具体数值,但强调了其“卓越性能”。该基准的发布为触觉数据压缩领域的研究提供了一个统一的评估平台,方便研究者比较不同算法的性能。
🎯 应用场景
该研究成果可广泛应用于机器人触觉感知领域,例如远程操作、自主导航、物体识别和操作等。通过高效的触觉数据压缩,可以降低带宽需求,提高机器人系统的实时性和可靠性。此外,该基准的发布将促进触觉数据压缩领域的研究,推动相关技术的发展,为更智能、更灵活的机器人应用奠定基础。
📄 摘要(原文)
Tactile sensing is crucial for embodied intelligence, providing fine-grained perception and control in complex environments. However, efficient tactile data compression, which is essential for real-time robotic applications under strict bandwidth constraints, remains underexplored. The inherent heterogeneity and spatiotemporal complexity of tactile data further complicate this challenge. To bridge this gap, we introduce TaCo, the first comprehensive benchmark for Tactile data Codecs. TaCo evaluates 30 compression methods, including off-the-shelf compression algorithms and neural codecs, across five diverse datasets from various sensor types. We systematically assess both lossless and lossy compression schemes on four key tasks: lossless storage, human visualization, material and object classification, and dexterous robotic grasping. Notably, we pioneer the development of data-driven codecs explicitly trained on tactile data, TaCo-LL (lossless) and TaCo-L (lossy). Results have validated the superior performance of our TaCo-LL and TaCo-L. This benchmark provides a foundational framework for understanding the critical trade-offs between compression efficiency and task performance, paving the way for future advances in tactile perception.