Optimal Control of Microswimmers for Trajectory Tracking Using Bayesian Optimization
作者: Lucas Palazzolo, Mickaël Binois, Laëtitia Giraldi
分类: cs.RO, math.OC
发布日期: 2026-02-10
备注: 16 pages, 16 figures
💡 一句话要点
提出基于贝叶斯优化的微型游泳器轨迹跟踪最优控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 微型游泳器 轨迹跟踪 最优控制 贝叶斯优化 微型机器人
📋 核心要点
- 微型游泳器轨迹跟踪面临低雷诺数环境下的复杂控制设计挑战,现有方法计算成本高昂或依赖复杂梯度计算。
- 论文提出结合B样条参数化和贝叶斯优化的最优控制框架,无需复杂梯度计算即可有效处理高计算成本问题。
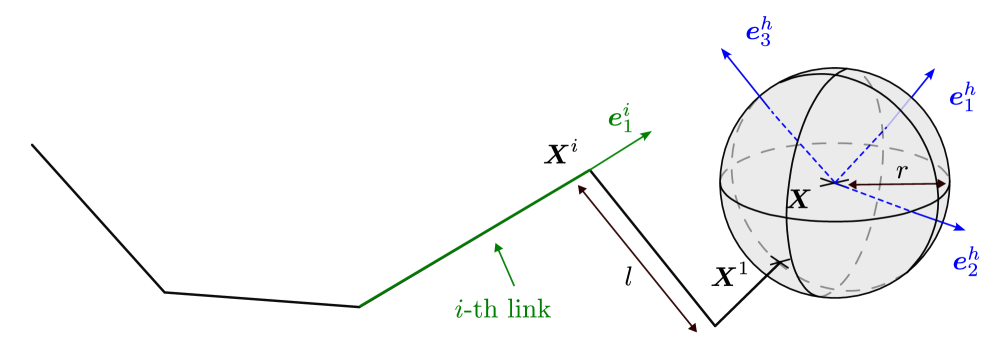
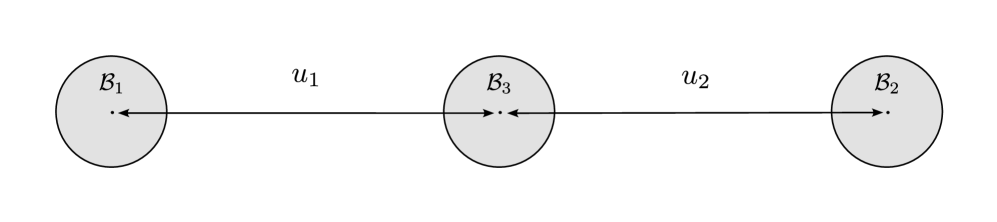
- 实验表明,该方法能成功控制鞭毛磁性游泳器和三球游泳器,实现精确轨迹跟踪,并能适应壁诱导的流体动力效应。
📝 摘要(中文)
微型游泳器的轨迹跟踪是微型机器人领域的一个关键挑战,因为低雷诺数动力学使得控制设计特别复杂。本文将轨迹跟踪问题建模为一个最优控制问题,并结合B样条参数化和贝叶斯优化来解决它,从而能够在不进行复杂梯度计算的情况下处理高计算成本。该方法应用于鞭毛磁性游泳器,重现了各种目标轨迹,包括在实验研究中观察到的生物启发路径。此外,还在三球游泳器模型上评估了该方法,证明它可以适应并部分补偿壁诱导的流体动力效应。所提出的优化策略可以一致地应用于不同保真度的模型,从低维基于ODE的模型到高保真基于PDE的模拟,显示了其鲁棒性和通用性。这些结果突出了贝叶斯优化作为微尺度运动中复杂流固耦合作用下最优控制策略的多功能工具的潜力。
🔬 方法详解
问题定义:微型游泳器在低雷诺数环境下的精确轨迹跟踪控制问题。现有方法通常计算成本高昂,或者需要复杂的梯度计算,难以在实际应用中有效部署。此外,现有方法难以适应复杂的流固耦合作用,例如壁效应等。
核心思路:将轨迹跟踪问题转化为最优控制问题,并利用贝叶斯优化算法寻找最优控制策略。贝叶斯优化能够有效地处理高计算成本的黑盒优化问题,无需计算梯度,适用于复杂的流体动力学模型。B样条参数化用于平滑控制信号,减少优化变量的数量。
技术框架:该方法包含以下几个主要步骤:1) 使用B样条对控制信号进行参数化;2) 定义一个成本函数,用于衡量实际轨迹与目标轨迹之间的差异;3) 使用贝叶斯优化算法搜索最优的B样条控制点,以最小化成本函数。该框架可以应用于不同保真度的微型游泳器模型,包括基于常微分方程(ODE)的简化模型和基于偏微分方程(PDE)的高精度模型。
关键创新:将贝叶斯优化应用于微型游泳器的最优控制问题,克服了传统方法计算成本高昂的缺点。该方法无需计算梯度,适用于复杂的流体动力学模型,并且能够有效地处理高维优化问题。此外,该方法具有很强的通用性,可以应用于不同类型的微型游泳器和不同的环境条件。
关键设计:成本函数的设计至关重要,需要综合考虑轨迹跟踪的精度、控制信号的平滑性和能量消耗等因素。B样条的阶数和控制点的数量需要根据具体问题进行调整,以平衡优化精度和计算成本。贝叶斯优化算法的选择和参数设置也会影响优化效果,常用的贝叶斯优化算法包括高斯过程回归和树状Parzen估计器。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法能够成功控制鞭毛磁性游泳器和三球游泳器,实现对各种目标轨迹的精确跟踪,包括生物启发路径。在三球游泳器模型中,该方法能够适应并部分补偿壁诱导的流体动力效应。该方法在不同保真度的模型上均表现出良好的性能,验证了其鲁棒性和通用性。
🎯 应用场景
该研究成果可应用于微型机器人的精确操控、药物递送、微流体器件设计等领域。通过优化微型游泳器的运动轨迹,可以实现对特定目标的精确导航和操作,例如在生物体内进行靶向药物递送或在微流体芯片中进行细胞分选。此外,该方法还可以用于研究微型游泳器的运动机理和流体动力学特性。
📄 摘要(原文)
Trajectory tracking for microswimmers remains a key challenge in microrobotics, where low-Reynolds-number dynamics make control design particularly complex. In this work, we formulate the trajectory tracking problem as an optimal control problem and solve it using a combination of B-spline parametrization with Bayesian optimization, allowing the treatment of high computational costs without requiring complex gradient computations. Applied to a flagellated magnetic swimmer, the proposed method reproduces a variety of target trajectories, including biologically inspired paths observed in experimental studies. We further evaluate the approach on a three-sphere swimmer model, demonstrating that it can adapt to and partially compensate for wall-induced hydrodynamic effects. The proposed optimization strategy can be applied consistently across models of different fidelity, from low-dimensional ODE-based models to high-fidelity PDE-based simulations, showing its robustness and generality. These results highlight the potential of Bayesian optimization as a versatile tool for optimal control strategies in microscale locomotion under complex fluid-structure interactions.