LLM-Grounded Dynamic Task Planning with Hierarchical Temporal Logic for Human-Aware Multi-Robot Collaboration
作者: Shuyuan Hu, Tao Lin, Kai Ye, Yang Yang, Tianwei Zhang
分类: cs.RO, cs.CV
发布日期: 2026-02-10
💡 一句话要点
提出基于LLM和分层时序逻辑的多机器人人机协作动态任务规划方法
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多机器人协作 任务规划 大型语言模型 线性时序逻辑 人机交互
📋 核心要点
- 现有方法难以在开放世界中为多机器人生成既可行又高效的长时程任务规划。
- 该方法将LLM推理与分层LTL规范相结合,通过后退水平线规划动态调整任务。
- 实验表明,该方法在成功率、交互流畅性和规划延迟方面均优于现有方法。
📝 摘要(中文)
大型语言模型(LLM)使得非专业人员也能指定开放世界中的多机器人任务,但生成的计划通常缺乏运动学可行性且效率不高,尤其是在长时程场景中。线性时序逻辑(LTL)等形式化方法虽然能保证正确性和最优性,但通常局限于静态、离线环境,且计算可扩展性较差。为了弥合这一差距,我们提出了一种神经符号框架,该框架将LLM推理融入到分层LTL规范中,并解决了相应的同步任务分配和规划(STAP)问题。与静态方法不同,我们的系统通过具有实时感知的后退水平线规划(RHP)循环来解决随机环境变化,例如移动的用户或更新的指令,从而通过分层状态空间动态地细化计划。大量的真实世界实验表明,我们的方法在成功率和交互流畅性方面显著优于基线方法,同时最大限度地减少了规划延迟。
🔬 方法详解
问题定义:论文旨在解决开放世界中多机器人协作任务规划问题,现有方法主要存在以下痛点:一是LLM生成的计划缺乏运动学可行性和效率,尤其在长时程场景下表现不佳;二是传统的形式化方法(如LTL)虽然保证了正确性和最优性,但难以处理动态环境变化,且计算复杂度高,难以扩展。
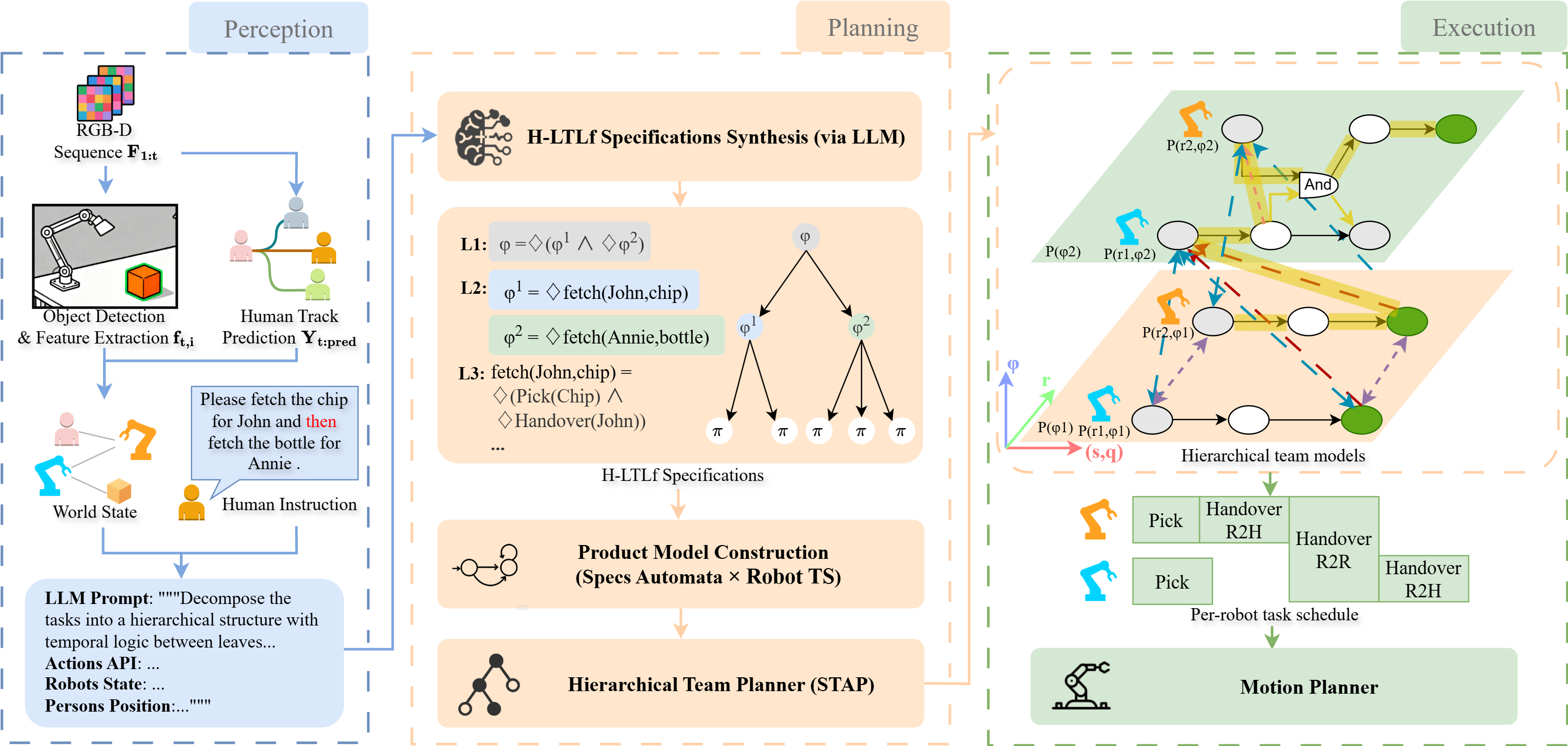
核心思路:论文的核心思路是将LLM的强大推理能力与LTL的形式化验证能力相结合,构建一个神经符号框架。LLM负责生成高层次的任务描述,LTL负责保证任务执行的正确性和最优性。通过分层状态空间和后退水平线规划,系统能够动态地适应环境变化,并实时优化任务计划。
技术框架:整体框架包含以下几个主要模块:1) LLM任务描述模块:利用LLM将用户指令转化为高层次的任务描述;2) 分层LTL规范模块:将任务描述转化为分层的LTL规范,用于形式化验证和任务规划;3) 同步任务分配和规划(STAP)模块:基于分层LTL规范,进行任务分配和路径规划;4) 后退水平线规划(RHP)模块:通过实时感知环境变化,动态调整任务计划。
关键创新:论文的关键创新在于:1) 将LLM与LTL相结合,弥合了LLM缺乏形式化保证和LTL难以处理动态环境的差距;2) 提出了分层LTL规范,降低了任务规划的复杂度,提高了计算效率;3) 采用后退水平线规划,使系统能够动态地适应环境变化,并实时优化任务计划。
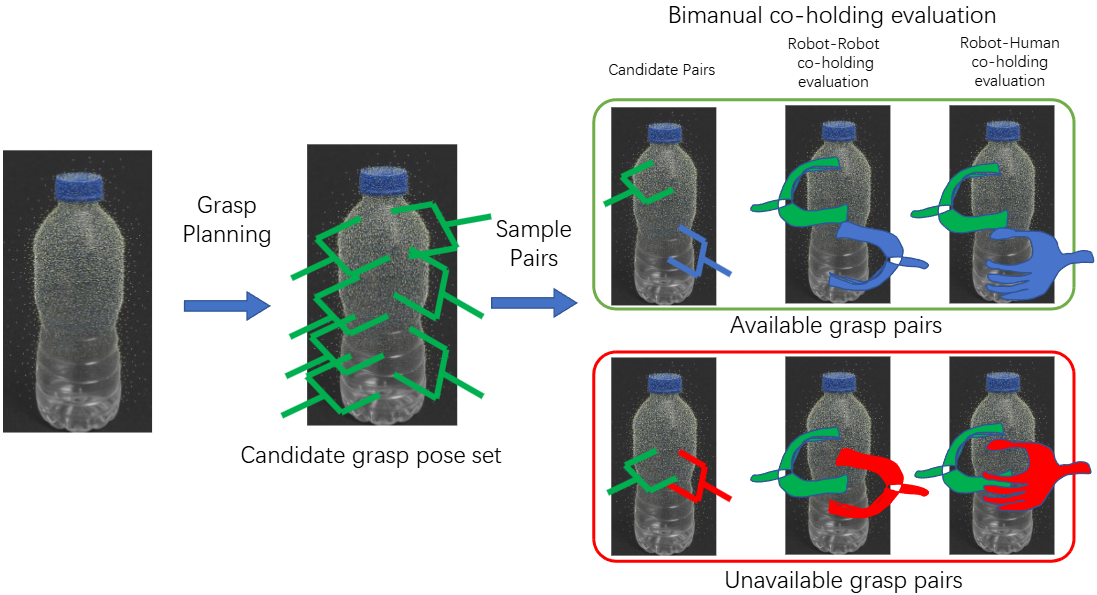
关键设计:论文在技术细节上,可能包含以下关键设计:1) LLM的prompt设计,如何引导LLM生成符合LTL规范的任务描述;2) 分层LTL规范的具体形式,如何将复杂的任务分解为多个层次的子任务;3) STAP模块的具体算法,如何高效地进行任务分配和路径规划;4) RHP模块的参数设置,如水平线长度、重规划频率等。
🖼️ 关键图片
📊 实验亮点
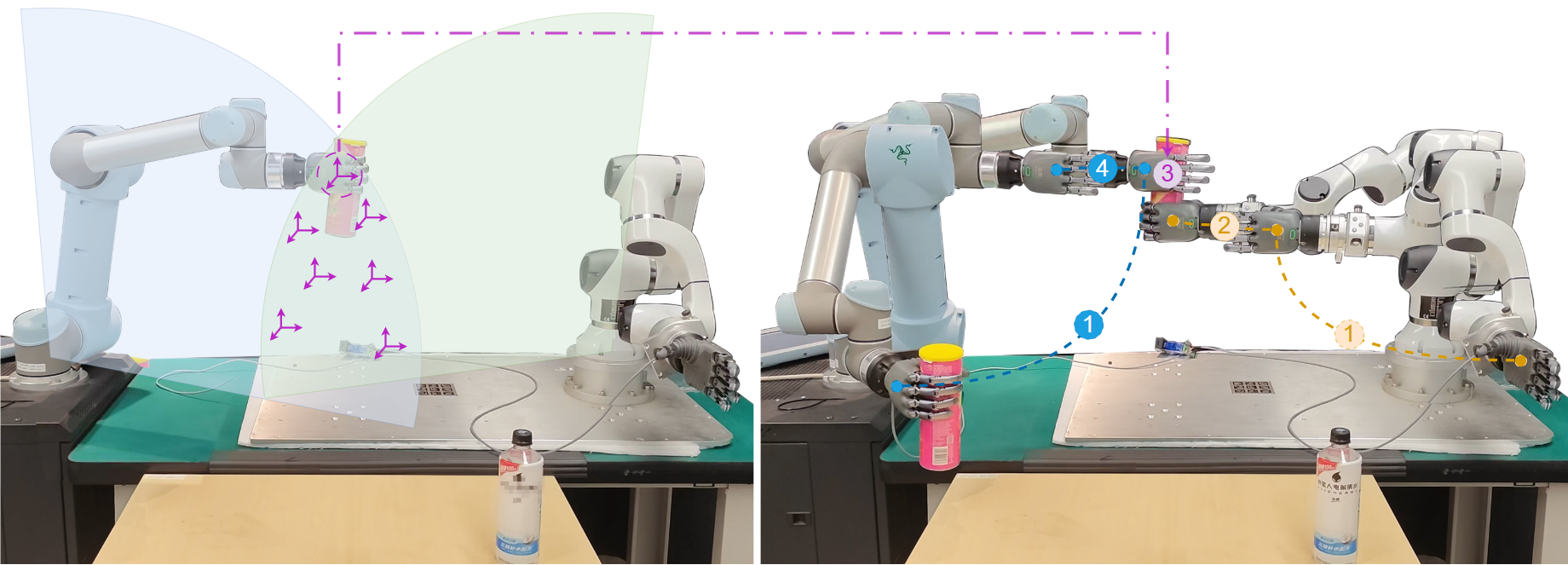
真实世界实验表明,该方法在成功率和交互流畅性方面显著优于基线方法,同时最大限度地减少了规划延迟。具体性能数据未知,但摘要强调了显著的性能提升,表明该方法在实际应用中具有很强的竞争力。
🎯 应用场景
该研究成果可应用于各种多机器人协作场景,例如:智能仓储、自动化物流、智能制造、搜救行动等。通过结合LLM的自然语言理解能力和LTL的形式化验证能力,可以实现更加智能、可靠和高效的多机器人系统,从而提高生产效率、降低运营成本、保障人员安全。
📄 摘要(原文)
While Large Language Models (LLM) enable non-experts to specify open-world multi-robot tasks, the generated plans often lack kinematic feasibility and are not efficient, especially in long-horizon scenarios. Formal methods like Linear Temporal Logic (LTL) offer correctness and optimal guarantees, but are typically confined to static, offline settings and struggle with computational scalability. To bridge this gap, we propose a neuro-symbolic framework that grounds LLM reasoning into hierarchical LTL specifications and solves the corresponding Simultaneous Task Allocation and Planning (STAP) problem. Unlike static approaches, our system resolves stochastic environmental changes, such as moving users or updated instructions via a receding horizon planning (RHP) loop with real-time perception, which dynamically refines plans through a hierarchical state space. Extensive real-world experiments demonstrate that our approach significantly outperforms baseline methods in success rate and interaction fluency while minimizing planning latency.