Reduced-order Control and Geometric Structure of Learned Lagrangian Latent Dynamics
作者: Katharina Friedl, Noémie Jaquier, Seungyeon Kim, Jens Lundell, Danica Kragic
分类: cs.RO, math.OC
发布日期: 2026-02-09
备注: 20 pages, 15 figures
💡 一句话要点
提出基于学习的拉格朗日隐空间动力学降阶控制框架,用于高维机械系统控制。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 拉格朗日动力学 降阶控制 隐空间学习 结构保持 软体机器人
📋 核心要点
- 高维机械系统(如柔性物体或软体机器人)难以获得精确的动力学模型,限制了基于模型的控制器的应用。
- 论文提出一种基于学习的结构保持降阶动力学隐空间控制框架,适用于高维拉格朗日系统,并推导了相应的控制律。
- 通过模拟和真实世界的实验验证了所提出的控制器的准确性,并为稳定性和收敛性提供了可解释的条件。
📝 摘要(中文)
本文提出了一种基于学习的隐空间控制框架,用于高维拉格朗日系统的结构保持降阶动力学建模。针对全驱动系统,推导了一种降阶跟踪控制律,并采用黎曼几何的视角研究基于投影的降阶模型,分析了潜在的和投影的闭环动力学。通过量化建模误差的来源,推导了可解释的稳定性和收敛性条件。通过引入学习到的驱动模式,将所提出的控制器和分析扩展到欠驱动系统。在模拟和真实系统上的实验结果验证了理论研究和控制器的准确性。
🔬 方法详解
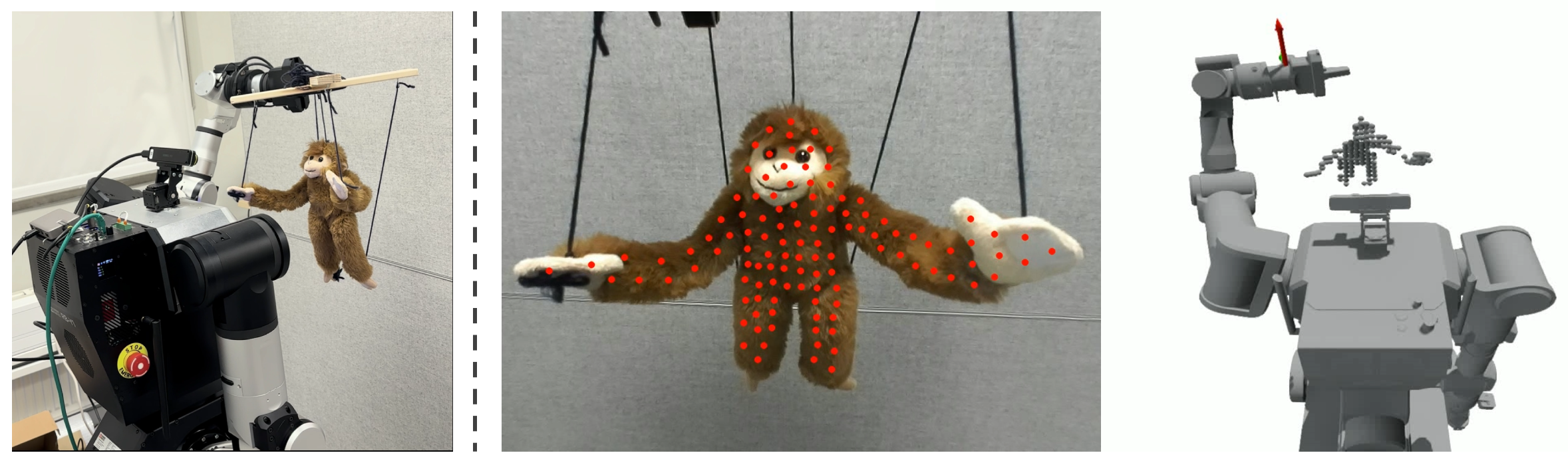
问题定义:针对高维机械系统,如柔性物体和软体机器人,精确的动力学模型难以获取,这限制了基于模型的控制器的应用。现有的神经架构虽然可以学习近似复杂的动力学,但通常局限于低维系统,或者由于缺乏嵌入的物理结构,控制保证有限。
核心思路:论文的核心思路是学习一个低维的、结构保持的拉格朗日动力学模型,并在该隐空间中设计控制器。通过降阶模型,可以简化控制器的设计和分析,同时利用神经网络学习复杂动力学的能力。结构保持特性有助于保证控制器的稳定性和收敛性。
技术框架:该框架包含以下几个主要模块:1) 数据收集:通过仿真或实验收集系统状态和控制输入的数据。2) 隐空间动力学学习:使用神经网络学习一个低维的拉格朗日动力学模型,该模型能够捕捉系统的重要动态特征。3) 降阶控制器设计:在学习到的隐空间动力学模型上设计控制器,例如跟踪控制器。4) 稳定性分析:通过量化建模误差,推导稳定性和收敛性的条件。5) 欠驱动系统扩展:引入学习到的驱动模式,将控制器和分析扩展到欠驱动系统。
关键创新:该论文的关键创新在于:1) 提出了一个基于学习的结构保持降阶动力学隐空间控制框架,适用于高维拉格朗日系统。2) 推导了全驱动系统的降阶跟踪控制律,并从黎曼几何的角度分析了闭环动力学。3) 提出了欠驱动系统的控制方法,通过学习驱动模式来处理欠驱动问题。
关键设计:论文的关键设计包括:1) 使用神经网络学习拉格朗日动力学模型,可能采用变分自编码器(VAE)或生成对抗网络(GAN)等架构。2) 设计合适的损失函数,以保证学习到的动力学模型的准确性和结构保持特性。3) 采用黎曼几何的工具来分析闭环动力学,并推导稳定性和收敛性的条件。4) 设计学习驱动模式的网络结构和损失函数,以有效地处理欠驱动问题。具体的参数设置和网络结构在论文中可能未详细说明,属于未知信息。
🖼️ 关键图片
📊 实验亮点
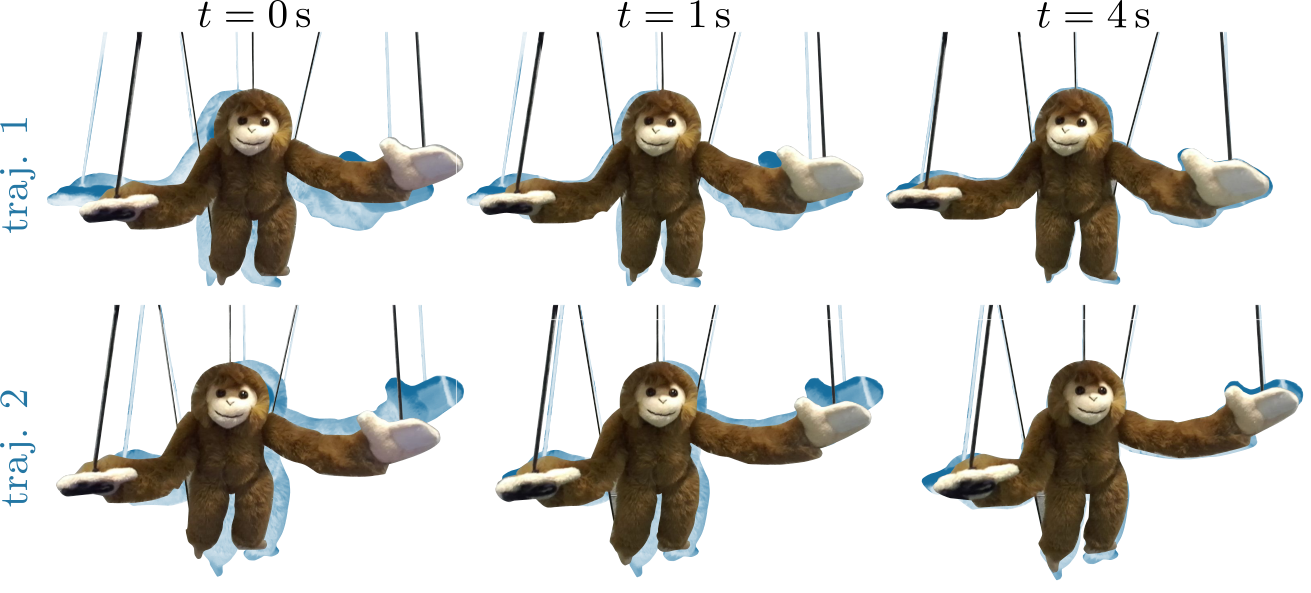
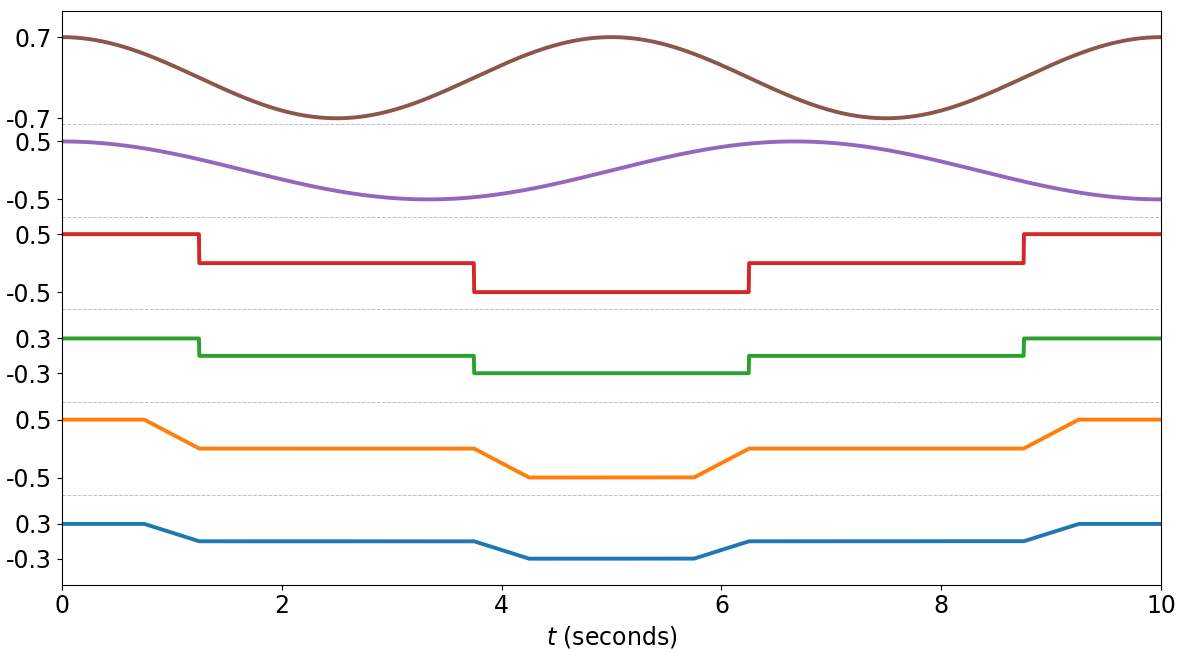
论文在模拟和真实世界的系统上进行了实验验证。实验结果表明,所提出的控制器能够有效地跟踪目标轨迹,并具有良好的稳定性和收敛性。具体的性能数据和对比基线在摘要中未提及,属于未知信息。但实验验证了理论分析的有效性。
🎯 应用场景
该研究成果可应用于软体机器人控制、柔性物体操作、高维机械系统的运动规划与控制等领域。通过学习低维动力学模型,可以简化复杂系统的控制设计,提高控制器的鲁棒性和效率。未来,该方法有望应用于医疗机器人、康复机器人、工业自动化等领域。
📄 摘要(原文)
Model-based controllers can offer strong guarantees on stability and convergence by relying on physically accurate dynamic models. However, these are rarely available for high-dimensional mechanical systems such as deformable objects or soft robots. While neural architectures can learn to approximate complex dynamics, they are either limited to low-dimensional systems or provide only limited formal control guarantees due to a lack of embedded physical structure. This paper introduces a latent control framework based on learned structure-preserving reduced-order dynamics for high-dimensional Lagrangian systems. We derive a reduced tracking law for fully actuated systems and adopt a Riemannian perspective on projection-based model-order reduction to study the resulting latent and projected closed-loop dynamics. By quantifying the sources of modeling error, we derive interpretable conditions for stability and convergence. We extend the proposed controller and analysis to underactuated systems by introducing learned actuation patterns. Experimental results on simulated and real-world systems validate our theoretical investigation and the accuracy of our controllers.