Finite-Time Teleoperation of Euler-Lagrange Systems via Energy-Shaping
作者: Lazaro F. Torres, Carlos I. Aldana, Emmanuel Nuño, Emmanuel Cruz-Zavala
分类: cs.RO
发布日期: 2026-02-09
💡 一句话要点
提出基于能量塑形的有限时间遥操作控制器,用于欧拉-拉格朗日系统
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 遥操作 有限时间控制 能量塑形 欧拉-拉格朗日系统 非线性控制
📋 核心要点
- 现有遥操作控制方法在处理非线性系统和保证有限时间收敛方面存在挑战。
- 论文利用能量塑形方法,设计控制器使系统能量函数满足特定条件,从而实现有限时间收敛。
- 通过仿真和实验验证了所提出控制器的有效性,表明其能够实现精确的遥操作控制。
📝 摘要(中文)
本文提出了一系列用于全驱动非线性欧拉-拉格朗日系统双边遥操作的有限时间控制器。基于能量塑形框架,并在与人和环境被动交互的标准假设下,该控制器确保在没有时间延迟的情况下,位置误差和速度全局收敛到零。在这种情况下,闭环系统允许负度齐次逼近,从而在有限时间内实现控制目标。所提出的控制器是简单的、连续时间的比例加阻尼注入方案,并通过仿真和实验结果进行了验证。
🔬 方法详解
问题定义:本文旨在解决全驱动非线性欧拉-拉格朗日系统的双边遥操作问题,目标是在有限时间内将主从机械臂的位置误差和速度误差收敛到零。现有的遥操作控制方法可能无法保证有限时间收敛,或者在处理非线性系统时性能下降。
核心思路:论文的核心思路是利用能量塑形方法设计控制器。能量塑形通过改变系统的能量函数,使其具有期望的稳定特性。具体而言,通过设计合适的控制输入,使得系统的能量函数沿着期望的轨迹变化,最终达到平衡状态,从而实现控制目标。这种方法能够有效地处理非线性系统,并保证系统的稳定性。
技术框架:该方法基于能量塑形框架,主要包括以下几个步骤:1) 建立主从机械臂的欧拉-拉格朗日动力学模型;2) 设计能量函数,使其最小值对应于期望的状态;3) 设计控制输入,使得系统的能量函数沿着期望的轨迹变化,最终收敛到最小值。控制器的具体形式为比例加阻尼注入,即控制输入由比例项和阻尼项组成,比例项用于减小位置误差,阻尼项用于抑制速度。
关键创新:该论文的关键创新在于提出了一种基于能量塑形的有限时间遥操作控制器。与传统的遥操作控制方法相比,该方法能够保证有限时间收敛,并且适用于非线性系统。此外,该控制器具有结构简单、易于实现的优点。
关键设计:控制器的关键设计在于能量函数的选择和控制输入的确定。能量函数需要满足一定的条件,例如正定性、可微性等,以保证系统的稳定性。控制输入需要能够有效地改变系统的能量函数,使其沿着期望的轨迹变化。具体而言,比例项的增益和阻尼项的系数需要根据系统的动力学特性进行调整,以获得最佳的控制性能。
🖼️ 关键图片
📊 实验亮点
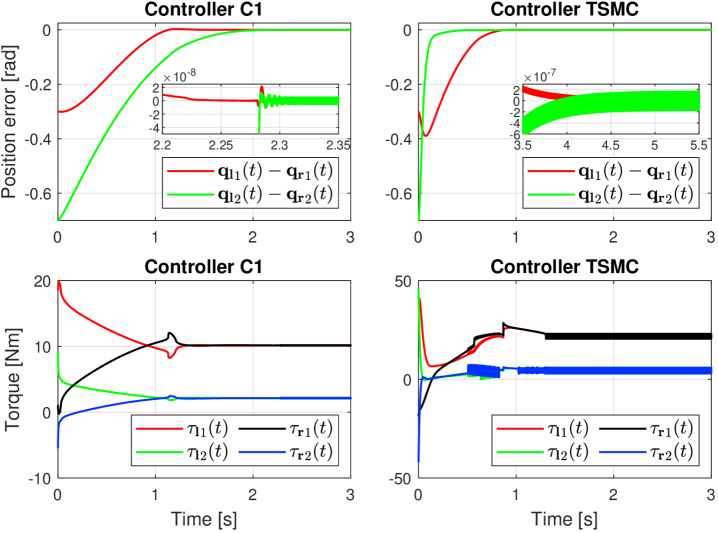
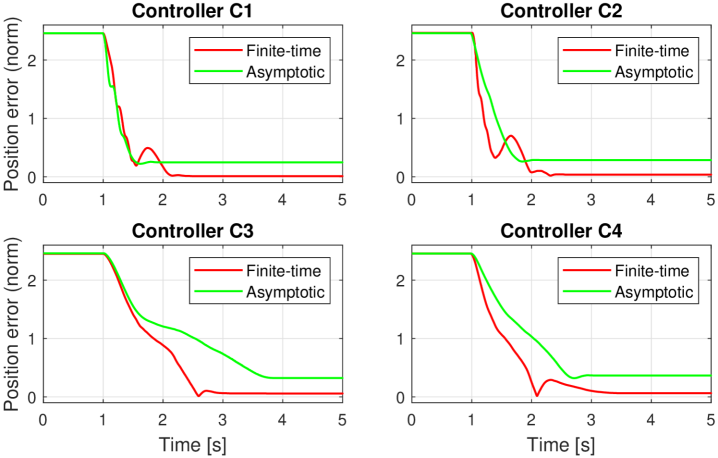
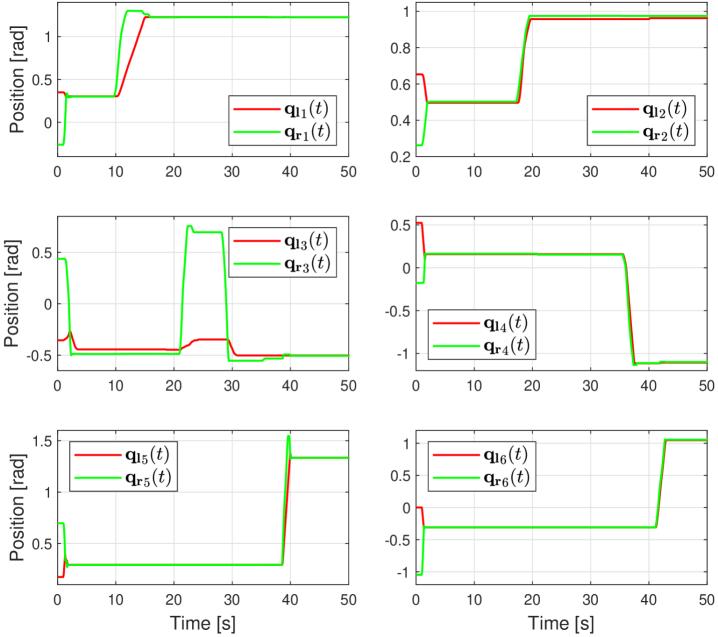
论文通过仿真和实验验证了所提出控制器的有效性。仿真结果表明,在没有时间延迟的情况下,位置误差和速度误差能够在有限时间内收敛到零。实验结果进一步验证了该控制器的可行性,表明其能够实现精确的遥操作控制。具体的性能数据(如收敛时间、稳态误差等)在论文中进行了详细的展示。
🎯 应用场景
该研究成果可应用于远程医疗、危险环境下的操作、深海勘探等领域。通过精确的遥操作控制,操作者可以在远端安全地控制机器人完成各种任务,例如远程手术、核电站维护、水下设备维修等。该技术能够提高操作效率,降低操作风险,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
This paper proposes a family of finite-time controllers for the bilateral teleoperation of fully actuated nonlinear Euler-Lagrange systems. Based on the energy-shaping framework and under the standard assumption of passive interactions with the human and the environment, the controllers ensure that the position error and velocities globally converge to zero in the absence of time delays. In this case, the closed-loop system admits a homogeneous approximation of negative degree, and thus the control objective is achieved in finite-time. The proposed controllers are simple, continuous-time proportional-plus-damping-injection schemes, validated through both simulation and experimental results.