A Precise Real-Time Force-Aware Grasping System for Robust Aerial Manipulation
作者: Kenghou Hoi, Yuze Wu, Annan Ding, Junjie Wang, Anke Zhao, Chengqian Zhang, Fei Gao
分类: cs.RO
发布日期: 2026-02-09
💡 一句话要点
提出一种精确的实时力感知抓取系统,用于鲁棒的无人机操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 无人机操作 力感知抓取 触觉传感器 磁力传感 实时控制
📋 核心要点
- 现有无人机操作缺乏力感知能力,难以安全抓取易碎物品,且重型力传感器不适用于典型四旋翼平台。
- 该论文提出了一种基于低成本触觉传感器的力感知抓取框架,实现高精度三维力测量和地磁干扰消除。
- 实验验证了该系统在气球抓取、动态负载变化等场景下的有效性,并实现了完全机载操作。
📝 摘要(中文)
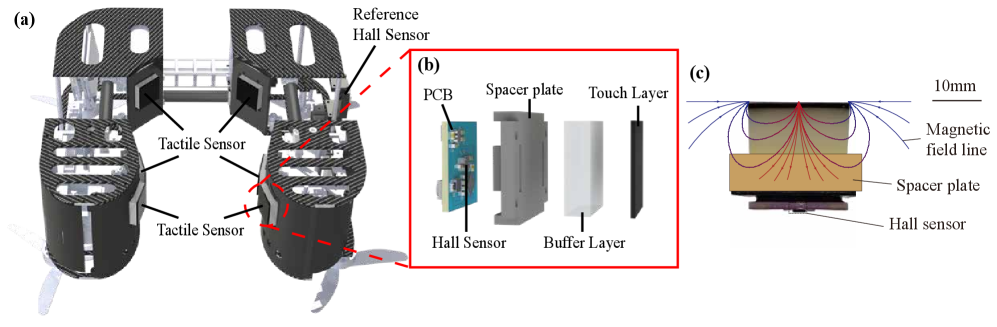
本文提出了一种新型的力感知抓取框架,旨在解决无人机操作中安全有效抓取和物理交互的问题。该框架集成了六个低成本、高灵敏度的皮肤式触觉传感器,利用基于磁力的触觉传感模块提供高精度的三维力测量。通过参考霍尔传感器消除地磁干扰,并简化了校准过程。该框架实现了精确的力感知抓取控制,能够安全地操纵易碎物体并实时测量抓取物体的重量。通过全面的真实世界实验验证了该系统的有效性,包括气球抓取、动态负载变化测试和消融研究。该方法实现了完全的机载操作,无需外部运动捕捉系统,显著提高了力敏感无人机操作的实用性。
🔬 方法详解
问题定义:无人机操作需要具备力感知能力,以实现安全有效的抓取和物理交互。然而,现有的方法要么依赖于笨重且昂贵的力传感器,这对于典型的四旋翼无人机平台来说并不适用;要么在没有力反馈的情况下进行抓取,这可能会损坏脆弱的物体。因此,需要一种轻量级、高精度、能够实时提供力反馈的抓取系统。
核心思路:该论文的核心思路是利用低成本、高灵敏度的皮肤式触觉传感器,结合磁力传感原理,设计一种轻量级的力感知抓取系统。通过参考霍尔传感器消除地磁干扰,并简化校准过程,从而实现精确的力感知抓取控制。
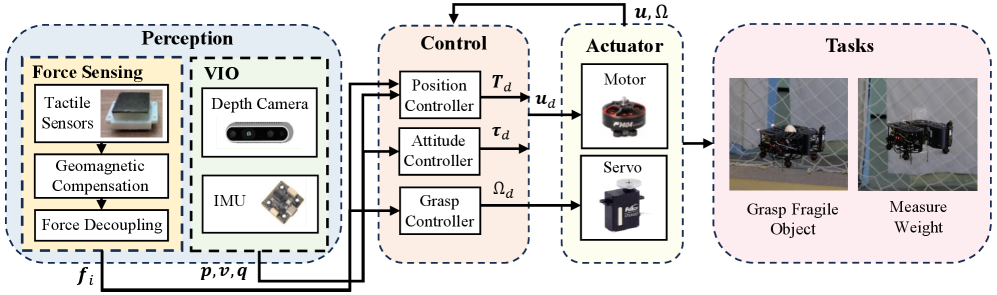
技术框架:该系统的整体框架包括以下几个主要模块:1) 基于磁力的触觉传感模块:用于测量三维力;2) 参考霍尔传感器:用于消除地磁干扰;3) 力感知抓取控制算法:用于实现精确的抓取和操作;4) 机载计算平台:用于实时处理传感器数据和执行控制算法。整个系统实现了完全的机载操作,无需外部运动捕捉系统。
关键创新:该论文最重要的技术创新点在于:1) 提出了一种基于磁力的触觉传感模块,能够以低成本实现高精度的三维力测量;2) 采用参考霍尔传感器消除地磁干扰,提高了力测量的准确性;3) 简化了校准过程,降低了系统的使用门槛。与现有方法相比,该方法在成本、重量和精度方面都具有优势。
关键设计:触觉传感器采用六个低成本的皮肤式传感器,每个传感器包含一个磁铁和一个霍尔传感器。通过测量磁场的变化来推断作用在传感器上的力。参考霍尔传感器用于测量环境磁场,从而消除地磁干扰。力感知抓取控制算法采用PID控制,根据触觉传感器提供的力反馈信息,调整抓取器的姿态和力度,从而实现精确的抓取和操作。具体的参数设置和控制算法细节在论文中进行了详细描述(未知)。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该系统能够精确地抓取易碎物品(如气球),并能够实时测量抓取物体的重量。动态负载变化测试表明,该系统具有良好的鲁棒性和适应性。消融研究验证了各个模块的有效性。该系统实现了完全的机载操作,无需外部运动捕捉系统,显著提高了实用性。具体的性能数据和对比基线在论文中进行了详细描述(未知)。
🎯 应用场景
该研究成果可广泛应用于无人机操作领域,例如:物流配送中易碎物品的抓取和搬运、灾难救援中对受困人员的精确施救、农业领域中对农作物的精细化管理等。该系统能够提高无人机操作的安全性、可靠性和智能化水平,具有重要的实际应用价值和广阔的发展前景。
📄 摘要(原文)
Aerial manipulation requires force-aware capabilities to enable safe and effective grasping and physical interaction. Previous works often rely on heavy, expensive force sensors unsuitable for typical quadrotor platforms, or perform grasping without force feedback, risking damage to fragile objects. To address these limitations, we propose a novel force-aware grasping framework incorporating six low-cost, sensitive skin-like tactile sensors. We introduce a magnetic-based tactile sensing module that provides high-precision three-dimensional force measurements. We eliminate geomagnetic interference through a reference Hall sensor and simplify the calibration process compared to previous work. The proposed framework enables precise force-aware grasping control, allowing safe manipulation of fragile objects and real-time weight measurement of grasped items. The system is validated through comprehensive real-world experiments, including balloon grasping, dynamic load variation tests, and ablation studies, demonstrating its effectiveness in various aerial manipulation scenarios. Our approach achieves fully onboard operation without external motion capture systems, significantly enhancing the practicality of force-sensitive aerial manipulation. The supplementary video is available at: https://www.youtube.com/watch?v=mbcZkrJEf1I.