Learning Human-Like Badminton Skills for Humanoid Robots
作者: Yeke Chen, Shihao Dong, Xiaoyu Ji, Jingkai Sun, Zeren Luo, Liu Zhao, Jiahui Zhang, Wanyue Li, Ji Ma, Bowen Xu, Yimin Han, Yudong Zhao, Peng Lu
分类: cs.RO, cs.AI, cs.LG
发布日期: 2026-02-09
备注: 10 pages, 4 figures
💡 一句话要点
提出Imitation-to-Interaction框架,使人形机器人掌握类人羽毛球技能
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 人形机器人 羽毛球 模仿学习 强化学习 Sim-to-Real 运动技能学习 流形扩展
📋 核心要点
- 人形机器人难以在羽毛球等运动中实现类人表现,需要解决全身协调和精确拦截的难题。
- 提出Imitation-to-Interaction框架,通过模仿学习和强化学习,使机器人从模仿到具备击球能力。
- 通过仿真验证框架有效性,并首次实现零样本sim-to-real迁移,使机器人具备类人羽毛球技能。
📝 摘要(中文)
在人形机器人中实现羽毛球等高要求运动中通用且类人的表现仍然是一个巨大的挑战。与标准运动或静态操作不同,这项任务需要无缝集成爆发性的全身协调和精确的、时间关键的拦截。虽然最近的进展已经实现了逼真的运动模仿,但在不影响风格自然性的前提下,弥合运动学模仿和功能性的、物理感知的击球之间的差距并非易事。为了解决这个问题,我们提出了Imitation-to-Interaction,这是一个渐进式强化学习框架,旨在将机器人从“模仿者”进化为有能力的“击球手”。我们的方法从人类数据中建立了一个强大的运动先验,将其提炼成一个紧凑的、基于模型的状态表示,并通过对抗性先验来稳定动力学。至关重要的是,为了克服专家演示的稀疏性,我们引入了一种流形扩展策略,将离散的击球点推广到一个密集的交互体积。我们通过掌握各种技能(包括挑高球和放网球)在模拟中验证了我们的框架。此外,我们展示了拟人化羽毛球技能到人形机器人的首次零样本sim-to-real迁移,成功地在物理世界中复制了人类运动员的运动优雅和功能精度。
🔬 方法详解
问题定义:论文旨在解决人形机器人在羽毛球运动中难以实现类人且功能性的击球动作的问题。现有方法主要集中在运动学模仿,缺乏对物理规律的感知,难以保证击球的准确性和自然性,同时专家演示数据稀疏,限制了模型的泛化能力。
核心思路:论文的核心思路是利用模仿学习从人类数据中学习运动先验,然后通过强化学习使机器人能够与环境交互并提升击球能力。通过流形扩展策略解决数据稀疏问题,并使用对抗性先验稳定动力学,最终实现类人且功能性的羽毛球技能。
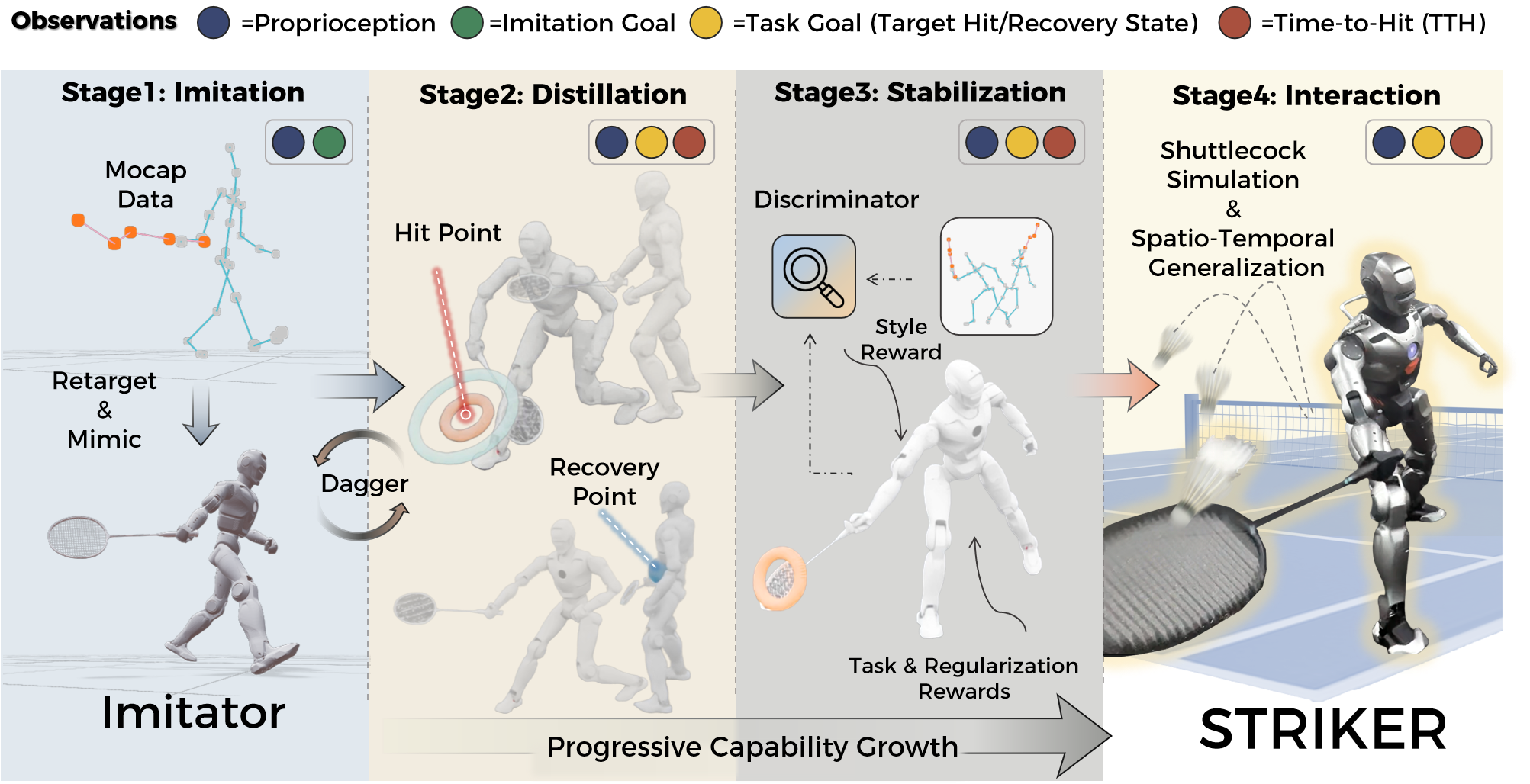
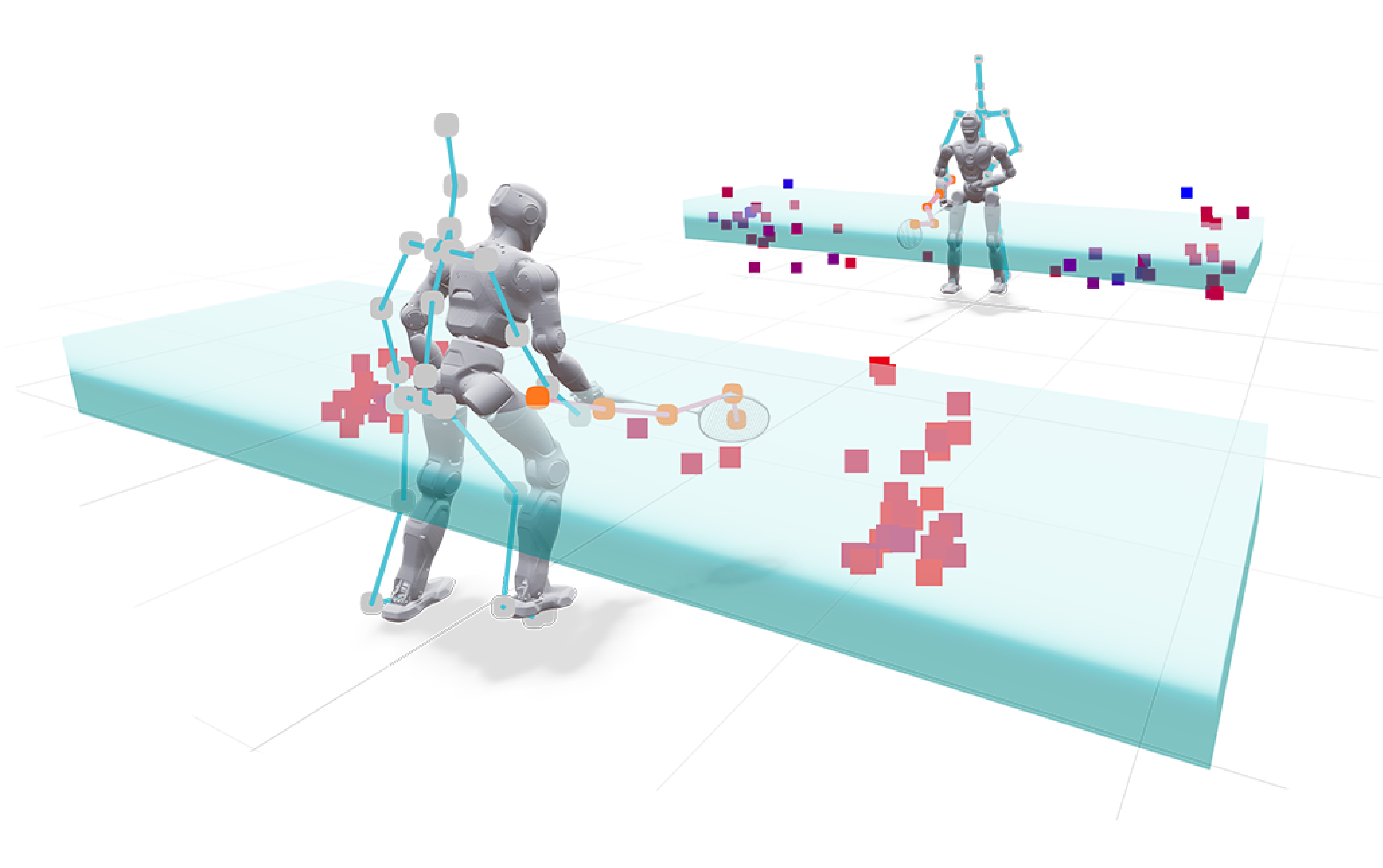
技术框架:Imitation-to-Interaction框架包含以下主要阶段:1) 从人类数据中学习运动先验,建立基于模型的紧凑状态表示;2) 通过对抗性先验稳定动力学;3) 利用流形扩展策略,将离散的击球点推广到密集的交互体积,克服数据稀疏性;4) 使用强化学习算法训练机器人,使其能够与环境交互并提升击球能力。
关键创新:论文的关键创新在于:1) 提出Imitation-to-Interaction框架,将模仿学习和强化学习相结合,实现从模仿到交互的进化;2) 引入流形扩展策略,有效解决了专家演示数据稀疏的问题;3) 使用对抗性先验稳定动力学,提高了训练的稳定性和泛化能力。与现有方法相比,该方法更注重物理规律的感知和环境交互,能够生成更自然、更有效的击球动作。
关键设计:论文中关键的设计包括:1) 基于模型的状态表示,能够更有效地利用人类数据;2) 对抗性先验的具体形式和训练方法,用于稳定动力学;3) 流形扩展策略的具体实现方式,例如使用高斯过程回归等方法进行插值;4) 强化学习算法的选择和奖励函数的设计,用于引导机器人学习击球策略。
🖼️ 关键图片
📊 实验亮点
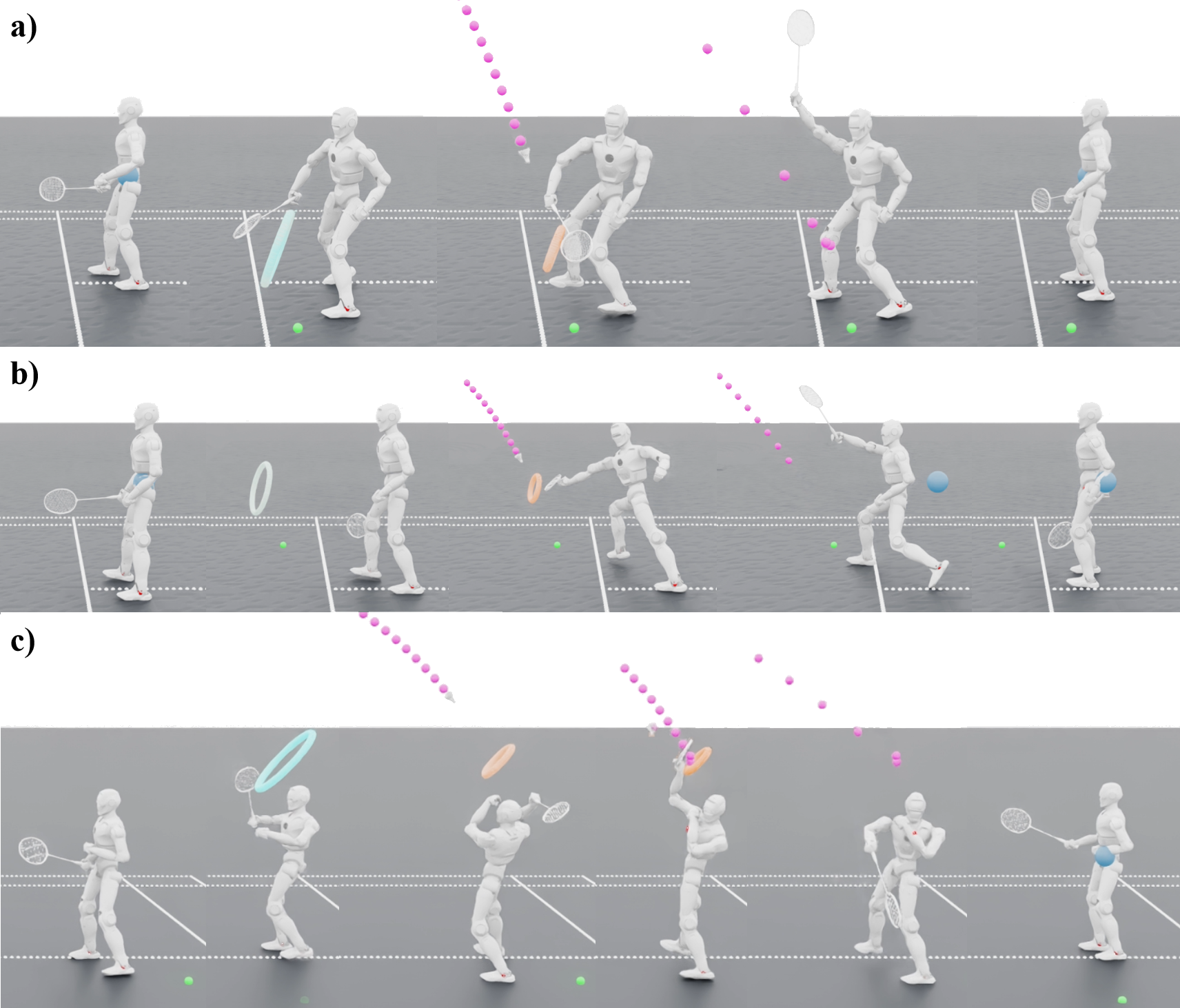
论文通过仿真实验验证了Imitation-to-Interaction框架的有效性,机器人成功掌握了挑高球和放网球等多种羽毛球技能。更重要的是,论文首次实现了零样本sim-to-real迁移,将仿真中训练的技能成功应用于真实人形机器人,使其能够流畅地完成类人羽毛球动作,展示了该方法强大的泛化能力。
🎯 应用场景
该研究成果可应用于人形机器人在体育运动、人机协作等领域的应用。例如,可以开发能够与人类进行羽毛球对打的机器人,或者应用于康复训练,辅助患者进行运动功能恢复。此外,该方法还可以推广到其他需要复杂全身协调和精确控制的任务中,例如机器人舞蹈、杂技表演等。
📄 摘要(原文)
Realizing versatile and human-like performance in high-demand sports like badminton remains a formidable challenge for humanoid robotics. Unlike standard locomotion or static manipulation, this task demands a seamless integration of explosive whole-body coordination and precise, timing-critical interception. While recent advances have achieved lifelike motion mimicry, bridging the gap between kinematic imitation and functional, physics-aware striking without compromising stylistic naturalness is non-trivial. To address this, we propose Imitation-to-Interaction, a progressive reinforcement learning framework designed to evolve a robot from a "mimic" to a capable "striker." Our approach establishes a robust motor prior from human data, distills it into a compact, model-based state representation, and stabilizes dynamics via adversarial priors. Crucially, to overcome the sparsity of expert demonstrations, we introduce a manifold expansion strategy that generalizes discrete strike points into a dense interaction volume. We validate our framework through the mastery of diverse skills, including lifts and drop shots, in simulation. Furthermore, we demonstrate the first zero-shot sim-to-real transfer of anthropomorphic badminton skills to a humanoid robot, successfully replicating the kinetic elegance and functional precision of human athletes in the physical world.