Benchmarking Autonomous Vehicles: A Driver Foundation Model Framework
作者: Yuxin Zhang, Cheng Wang, Hubert P. H. Shum
分类: cs.RO
发布日期: 2026-02-09
💡 一句话要点
提出驾驶员基础模型框架,用于全面评估自动驾驶车辆性能
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 自动驾驶 驾驶员基础模型 基准测试 数据集 行为克隆
📋 核心要点
- 自动驾驶车辆在安全性、舒适性和效率等方面仍落后于人类驾驶员,阻碍了其广泛应用。
- 本文提出驾驶员基础模型(DFM)框架,通过模仿人类驾驶行为来全面评估和提升自动驾驶系统。
- 该框架涵盖数据集构建、模型功能设计和技术方案探索,旨在为自动驾驶车辆的验证和确认提供新范例。
📝 摘要(中文)
自动驾驶车辆(AVs)有望彻底改变全球交通系统。然而,与经验丰富的人类驾驶员相比,自动驾驶在安全性、舒适性、通勤效率和能源经济性方面仍然面临挑战,导致其广泛接受度和市场渗透率远低于预期。本文假设可以通过开发驾驶员基础模型(DFM)来解决这些挑战。因此,本文提出了一个建立DFM的框架,以全面评估自动驾驶车辆。具体来说,本文描述了一种大规模数据集收集策略,用于训练DFM,讨论了模型应具备的核心功能,并探讨了实现这些功能的潜在技术解决方案。此外,本文还展示了DFM在运营范围内的效用,从定义以人为本的安全范围到建立能源经济性基准。总而言之,本文旨在形式化DFM的概念,并为自动驾驶车辆的系统规范、验证和确认引入一种新的范例。
🔬 方法详解
问题定义:自动驾驶车辆在安全性、舒适性、通勤效率和能源经济性等方面与人类驾驶员相比仍存在差距,导致其市场接受度不高。现有方法缺乏一个统一的、可泛化的评估基准,难以系统性地提升自动驾驶性能。
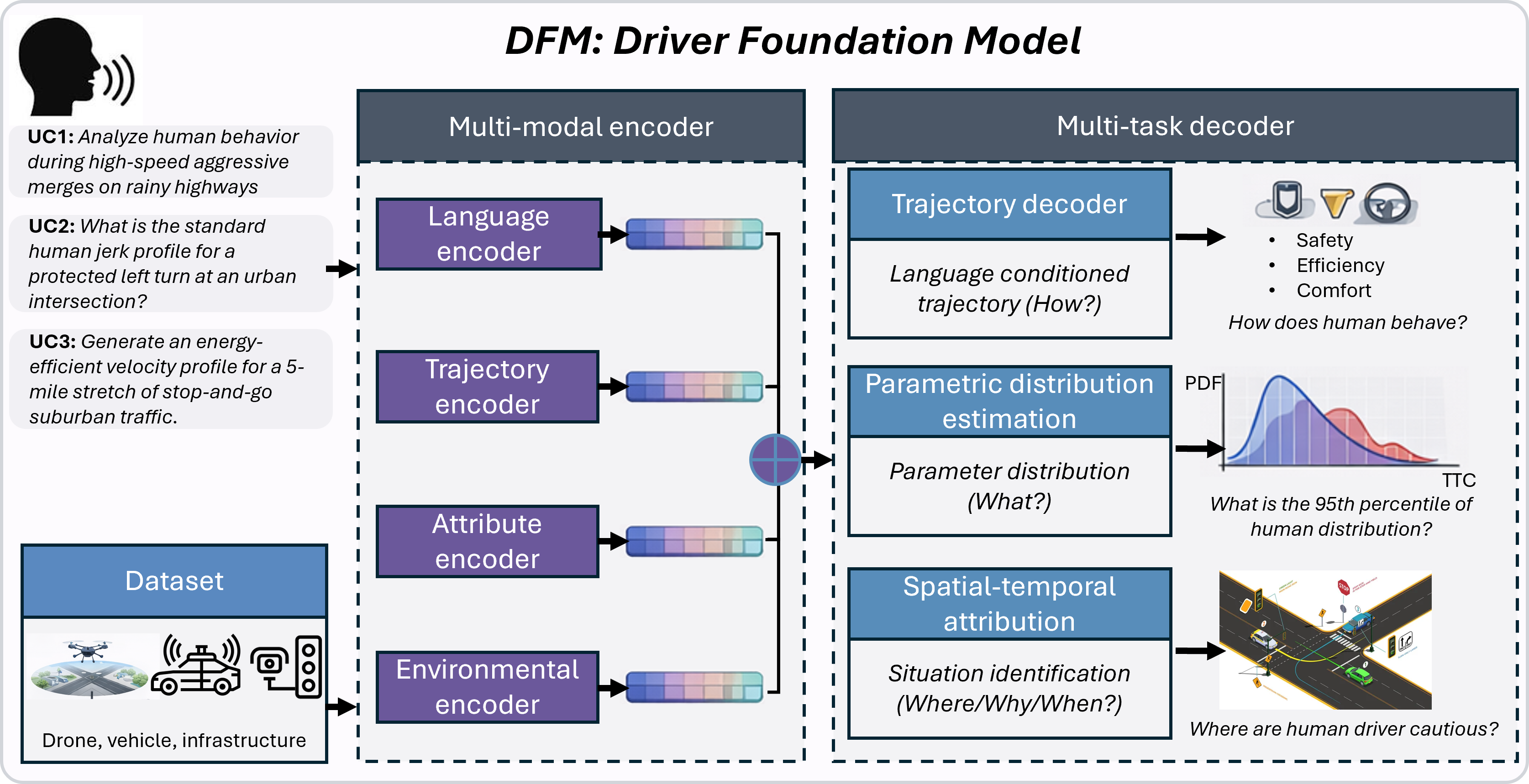
核心思路:本文的核心思路是构建一个驾驶员基础模型(DFM),该模型能够学习并模拟人类驾驶员的行为模式。通过将自动驾驶车辆的性能与DFM进行比较,可以更全面地评估其优缺点,并为改进提供方向。DFM可以作为自动驾驶系统开发、验证和确认的统一平台。
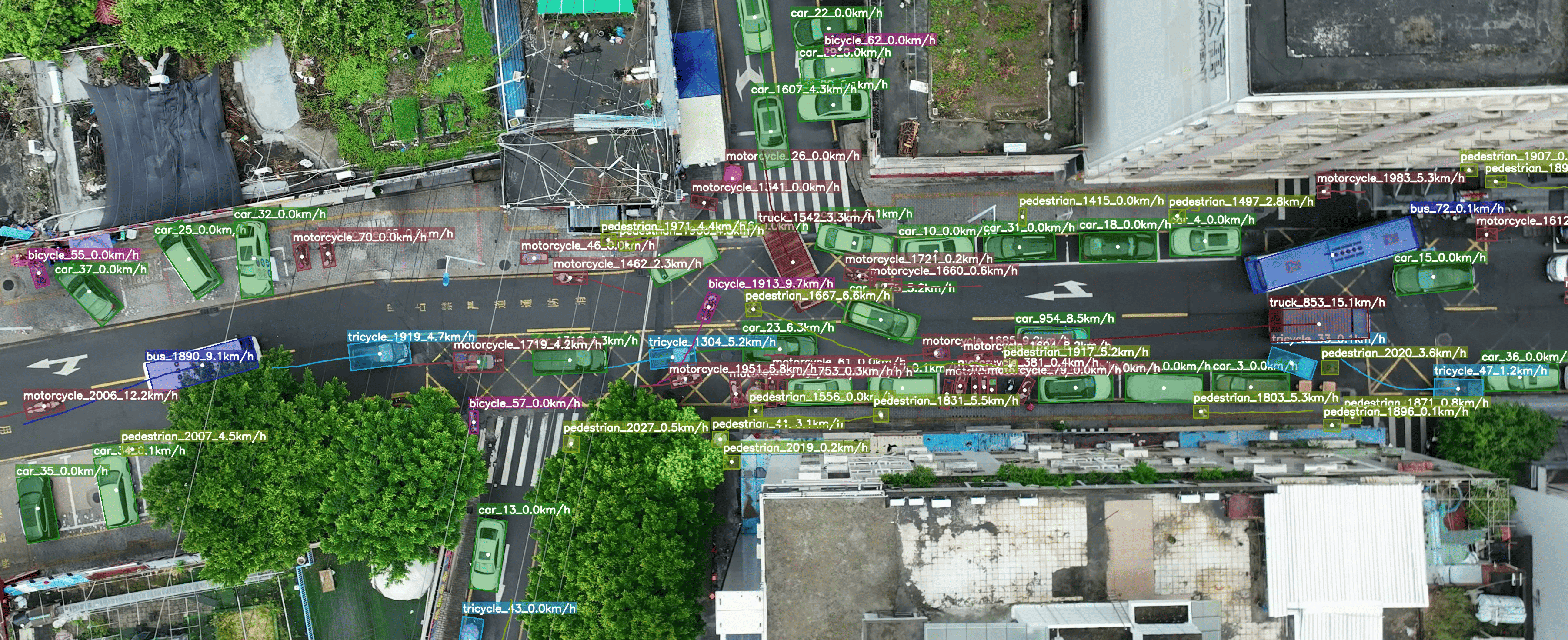
技术框架:该框架包含以下几个主要部分:1) 大规模数据集收集,用于训练DFM;2) DFM核心功能设计,包括感知、决策、控制等模块;3) 技术方案探索,研究如何利用深度学习等技术实现DFM的各项功能;4) DFM应用,例如定义安全范围、建立能源经济性基准等。整体流程是从数据收集到模型训练,再到模型评估和应用。
关键创新:本文最重要的技术创新点在于提出了驾驶员基础模型(DFM)的概念,并将其应用于自动驾驶车辆的评估和改进。与传统的基于规则或简单模型的评估方法相比,DFM能够更真实地反映人类驾驶行为,从而提供更准确和全面的评估结果。DFM可以学习人类驾驶员的驾驶风格和策略,从而为自动驾驶系统提供更有效的学习目标。
关键设计:数据集需要包含各种驾驶场景、天气条件和交通状况,以保证DFM的泛化能力。模型结构可以采用分层设计,包括感知层、决策层和控制层。损失函数可以结合行为克隆和强化学习,以提高模型的驾驶性能。关键参数包括学习率、批量大小、网络层数等,需要根据具体数据集和模型进行调整。
🖼️ 关键图片

📊 实验亮点
论文提出了一个完整的驾驶员基础模型框架,并详细描述了数据集构建、模型设计和应用场景。虽然论文没有提供具体的实验结果,但其提出的DFM概念和框架为自动驾驶车辆的评估和改进提供了一个新的思路和方向。该框架的实用性和有效性需要在未来的实验中进一步验证。
🎯 应用场景
该研究成果可应用于自动驾驶系统的开发、测试和验证,为自动驾驶车辆的安全性和可靠性提供保障。此外,该框架还可用于评估不同自动驾驶算法的性能,促进自动驾驶技术的进步。未来,该研究有望推动自动驾驶车辆的广泛应用,并为智能交通系统的发展做出贡献。
📄 摘要(原文)
Autonomous vehicles (AVs) are poised to revolutionize global transportation systems. However, its widespread acceptance and market penetration remain significantly below expectations. This gap is primarily driven by persistent challenges in safety, comfort, commuting efficiency and energy economy when compared to the performance of experienced human drivers. We hypothesize that these challenges can be addressed through the development of a driver foundation model (DFM). Accordingly, we propose a framework for establishing DFMs to comprehensively benchmark AVs. Specifically, we describe a large-scale dataset collection strategy for training a DFM, discuss the core functionalities such a model should possess, and explore potential technical solutions to realize these functionalities. We further present the utility of the DFM across the operational spectrum, from defining human-centric safety envelopes to establishing benchmarks for energy economy. Overall, We aim to formalize the DFM concept and introduce a new paradigm for the systematic specification, verification and validation of AVs.