Feasibility-Guided Planning over Multi-Specialized Locomotion Policies
作者: Ying-Sheng Luo, Lu-Ching Wang, Hanjaya Mandala, Yu-Lun Chou, Guilherme Christmann, Yu-Chung Chen, Yung-Shun Chan, Chun-Yi Lee, Wei-Chao Chen
分类: cs.RO
发布日期: 2026-02-08
备注: ICRA 2026
💡 一句话要点
提出可行性引导规划框架,解决多地形专家策略下的机器人运动规划问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 腿式机器人 运动规划 可行性网络 多专家策略 非结构化地形
📋 核心要点
- 现有方法难以将技能特定的策略集成到传统规划器中,而分层学习框架缺乏可解释性,且新增策略时需要重新训练。
- 论文核心在于提出可行性引导的规划框架,通过可行性网络预测地形可行性,指导经典规划算法生成最优路径。
- 实验结果表明,该方法能够在复杂地形上高效生成可靠的运动规划,并与底层策略能力对齐。
📝 摘要(中文)
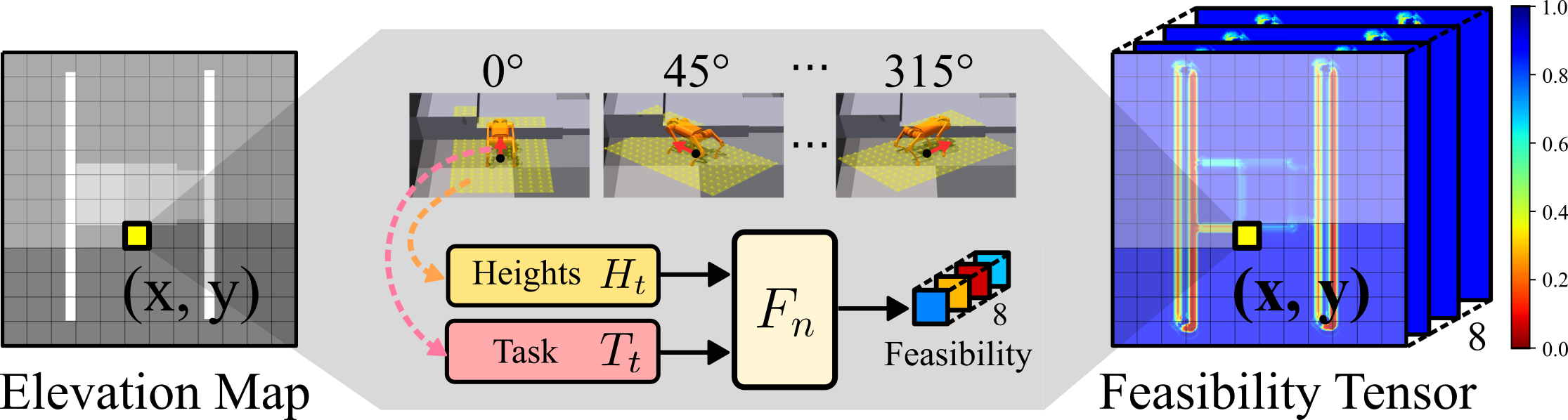
本文提出了一种可行性引导的规划框架,旨在解决腿式机器人在非结构化地形上的运动规划难题,尤其是在融合多个地形特定策略时。该框架将每个策略与一个可行性网络(Feasibility-Net)配对,该网络学习基于局部高程图和任务向量预测可行性张量。这种集成使得传统的规划算法能够推导出最优路径。通过仿真和真实世界的实验,证明了该方法能够有效地在各种具有挑战性的地形上生成可靠的规划,同时始终与底层策略的能力保持一致。
🔬 方法详解
问题定义:腿式机器人在非结构化地形上的运动规划是一个复杂的问题,尤其是在需要融合多个针对特定地形优化的运动策略(专家策略)时。现有的方法存在局限性:传统的规划器难以直接集成这些策略,而分层强化学习方法虽然可以处理多策略,但缺乏可解释性,并且每当添加新的策略时都需要重新训练,成本较高。
核心思路:论文的核心思路是利用一个可学习的可行性网络(Feasibility-Net)来预测在给定地形和任务目标下,特定运动策略的可行性。通过将这种可行性信息融入到传统的规划算法中,可以引导规划器选择最合适的策略,并生成可行的运动轨迹。这种方法避免了直接在策略空间中进行规划,而是利用可行性信息作为指导,从而简化了规划过程。
技术框架:整体框架包含以下几个主要模块:1) 多专家运动策略库:包含多个针对不同地形优化的运动策略。2) 可行性网络(Feasibility-Net):每个运动策略都配有一个对应的可行性网络,该网络以局部高程图和任务向量作为输入,预测该策略在该地形下的可行性张量。3) 规划器:使用传统的规划算法(如A*)在可行性张量的引导下,搜索最优路径。规划器根据可行性张量选择合适的运动策略,并生成相应的运动轨迹。
关键创新:最重要的技术创新点在于可行性网络的引入。与现有方法相比,该方法不需要重新训练整个系统来适应新的运动策略。只需要训练一个新的可行性网络,并将其添加到策略库中即可。此外,可行性网络提供了一种可解释的方式来理解不同策略的适用范围,从而提高了规划的可靠性。
关键设计:可行性网络(Feasibility-Net)通常采用卷积神经网络(CNN)结构,以局部高程图作为输入,提取地形特征。任务向量则包含目标位置、速度等信息。网络的输出是一个可行性张量,表示在不同位置和方向上执行该策略的可行性概率。损失函数通常采用二元交叉熵损失,用于衡量预测的可行性与实际可行性之间的差异。训练数据可以通过仿真或真实世界的实验收集。
🖼️ 关键图片


📊 实验亮点
论文通过仿真和真实世界的实验验证了所提出方法的效果。实验结果表明,该方法能够有效地在各种复杂地形上生成可行的运动规划,并与底层策略的能力保持一致。与传统的规划方法相比,该方法能够更好地利用多个专家策略的优势,从而提高了机器人的运动性能和鲁棒性。具体性能数据和对比基线在论文中进行了详细的展示。
🎯 应用场景
该研究成果可广泛应用于腿式机器人在复杂环境中的自主导航,例如搜救机器人、巡检机器人和物流机器人。通过融合多种地形适应性策略,机器人能够在各种具有挑战性的地形上安全可靠地移动,从而扩展了其应用范围和实用性。此外,该方法还可以应用于虚拟现实和游戏等领域,为虚拟角色提供更逼真的运动控制。
📄 摘要(原文)
Planning over unstructured terrain presents a significant challenge in the field of legged robotics. Although recent works in reinforcement learning have yielded various locomotion strategies, planning over multiple experts remains a complex issue. Existing approaches encounter several constraints: traditional planners are unable to integrate skill-specific policies, whereas hierarchical learning frameworks often lose interpretability and require retraining whenever new policies are added. In this paper, we propose a feasibility-guided planning framework that successfully incorporates multiple terrain-specific policies. Each policy is paired with a Feasibility-Net, which learned to predict feasibility tensors based on the local elevation maps and task vectors. This integration allows classical planning algorithms to derive optimal paths. Through both simulated and real-world experiments, we demonstrate that our method efficiently generates reliable plans across diverse and challenging terrains, while consistently aligning with the capabilities of the underlying policies.