Global Symmetry and Orthogonal Transformations from Geometrical Moment $n$-tuples
作者: Omar Tahri
分类: cs.RO, cs.CV
发布日期: 2026-02-08
💡 一句话要点
提出基于几何矩n元组的对称性检测与正交变换估计方法,提升机器人抓取稳定性。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 对称性检测 几何矩 正交变换 机器人抓取 三维重建
📋 核心要点
- 有效的目标抓取依赖于对称性检测,对称特征或轴有助于制定更稳定和平衡的抓取策略。
- 该论文利用几何矩来识别对称性并估计正交变换,为检测对称性和估计正交变换提供了独特的度量标准。
- 实验结果表明,该方法在2D和3D对象上具有鲁棒性和可靠性,并能有效提升对称平面检测的效率。
📝 摘要(中文)
本文提出了一种利用几何矩来识别对称性并估计正交变换(包括旋转和镜像变换)的方法,适用于中心位于坐标系原点的物体。该方法为检测对称性和估计正交变换提供了独特的度量标准,涵盖了旋转、反射及其组合。开发了一种全面的方法,用于在n维空间中获得这些函数,特别是矩n元组。在2D和3D对象上进行了广泛的验证测试,以确保所提出方法的鲁棒性和可靠性。此外,还将该方法与使用迭代优化来检测多个对称平面的最先进方法进行了比较。结果表明,将本文方法与迭代方法相结合,在检测到的对称平面数量和计算时间方面均能获得令人满意的结果。
🔬 方法详解
问题定义:论文旨在解决物体对称性检测和正交变换估计的问题,特别是在机器人抓取应用中。现有方法,如迭代优化方法,在计算效率上存在瓶颈,尤其是在处理复杂形状和多个对称平面时。因此,需要一种更高效、鲁棒的方法来检测对称性并估计相应的变换。
核心思路:论文的核心思路是利用几何矩的特性来表征物体的对称性。几何矩能够捕捉物体的形状特征,并且对于某些类型的变换具有不变性或特定的变换规律。通过分析几何矩的n元组,可以推导出对称性存在的条件以及相应的正交变换参数。
技术框架:该方法主要包含以下几个阶段:1) 计算物体的几何矩;2) 构建几何矩的n元组;3) 基于n元组推导对称性度量;4) 估计正交变换参数(旋转、反射等);5) 结合迭代优化方法(可选)进一步 refine 对称平面检测结果。
关键创新:该方法的关键创新在于利用几何矩n元组来直接推导对称性度量和正交变换参数,避免了复杂的迭代优化过程。这种方法能够更高效地检测对称性,并且能够处理多种类型的对称变换,包括旋转、反射及其组合。与传统的迭代优化方法相比,该方法在计算效率上具有显著优势。
关键设计:论文中关键的设计包括:1) 几何矩的选取和计算方式,需要选择合适的矩阶数和矩类型以捕捉关键的形状特征;2) n元组的构建方式,需要根据具体的对称性类型选择合适的n值和元组组合;3) 对称性度量的定义,需要设计能够有效区分对称和非对称情况的度量函数;4) 正交变换参数的估计方法,需要根据对称性度量结果推导出相应的旋转角度和反射平面。
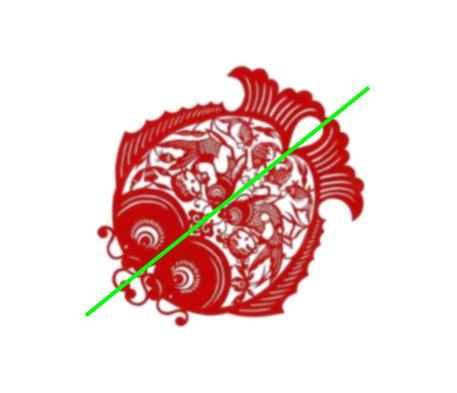
🖼️ 关键图片
📊 实验亮点
该方法在2D和3D对象上进行了广泛的验证,证明了其鲁棒性和可靠性。与基于迭代优化的方法相比,该方法在检测对称平面数量和计算时间方面均表现出优势。将该方法与迭代优化方法相结合,能够进一步提高对称平面检测的准确性和效率。具体性能数据(如对称平面检测精度、计算时间)未在摘要中明确给出,属于未知信息。
🎯 应用场景
该研究成果可应用于机器人抓取、三维重建、物体识别等领域。在机器人抓取中,能够帮助机器人快速准确地识别物体的对称轴,从而规划出更稳定、更有效的抓取姿态。在三维重建中,可以利用对称性约束来提高重建精度和鲁棒性。在物体识别中,对称性可以作为一种重要的形状特征,用于区分不同的物体类别。
📄 摘要(原文)
Detecting symmetry is crucial for effective object grasping for several reasons. Recognizing symmetrical features or axes within an object helps in developing efficient grasp strategies, as grasping along these axes typically results in a more stable and balanced grip, thereby facilitating successful manipulation. This paper employs geometrical moments to identify symmetries and estimate orthogonal transformations, including rotations and mirror transformations, for objects centered at the frame origin. It provides distinctive metrics for detecting symmetries and estimating orthogonal transformations, encompassing rotations, reflections, and their combinations. A comprehensive methodology is developed to obtain these functions in n-dimensional space, specifically moment ( n )-tuples. Extensive validation tests are conducted on both 2D and 3D objects to ensure the robustness and reliability of the proposed approach. The proposed method is also compared to state-of-the-art work using iterative optimization for detecting multiple planes of symmetry. The results indicate that combining our method with the iterative one yields satisfactory outcomes in terms of the number of symmetry planes detected and computation time.