UEREBot: Learning Safe Quadrupedal Locomotion under Unstructured Environments and High-Speed Dynamic Obstacles
作者: Zihao Xu, Runyu Lei, Zihao Li, Boxi Lin, Ce Hao, Jin Song Dong
分类: cs.RO
发布日期: 2026-02-07
💡 一句话要点
UEREBot:学习非结构化环境和高速动态障碍下的四足机器人安全运动
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 运动规划 动态避障 非结构化环境 分层控制 控制障碍函数 机器人安全
📋 核心要点
- 现有方法难以兼顾非结构化环境下的长期目标、地形通过性和高速动态避障,规划速度慢,反应策略牺牲目标。
- UEREBot采用分层框架,分离慢速规划和快速反应,通过时空规划器和威胁感知切换融合导航和避障动作。
- 实验表明,UEREBot在复杂环境中比基线方法实现了更高的避障成功率和更稳定的运动,同时保持了目标进展。
📝 摘要(中文)
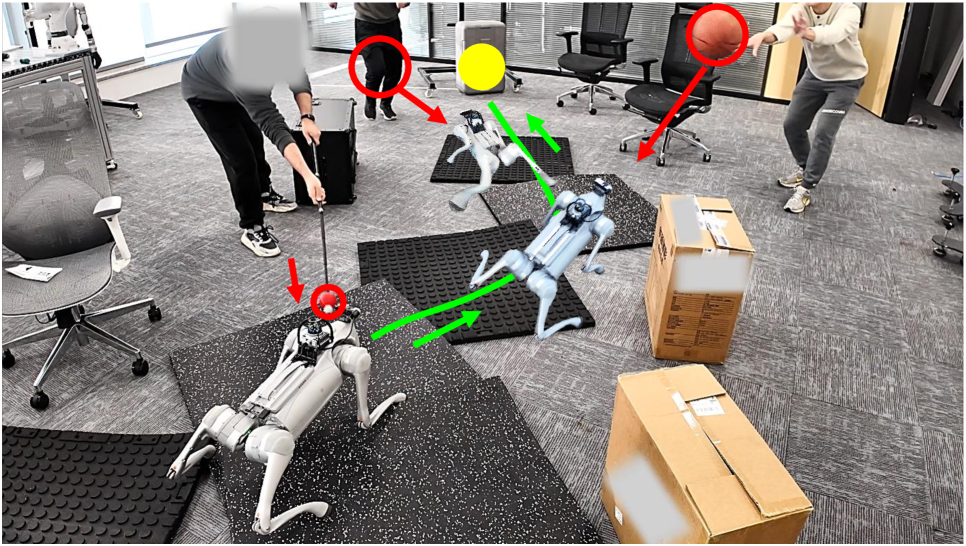
四足机器人在非结构化环境中的应用日益广泛。在这些环境中安全运动需要长期的目标进展、通过不平坦地形和静态约束的能力,以及避开高速动态障碍物。单个系统无法同时完全满足所有这三个目标:基于规划的决策可能太慢,而纯粹的反应式决策可能会牺牲目标进展和通过性。为了解决这个冲突,我们提出了UEREBot(非结构化环境反射式规避机器人),一个分层框架,它将慢速规划与即时反射式规避分离,并在执行过程中协调它们。UEREBot将任务表述为一个约束最优控制问题蓝图。它采用时空规划器,提供朝向目标的参考指导和威胁信号。然后,它使用威胁感知切换来将导航和反射动作融合到标称命令中,并使用控制障碍函数屏蔽作为最终的执行保障。我们在Isaac Lab模拟中评估了UEREBot,并将其部署在配备板载感知系统的Unitree Go2四足机器人上。在具有复杂静态结构和高速动态障碍物的各种环境中,UEREBot实现了比代表性基线更高的避障成功率和更稳定的运动,同时保持了目标进展,展示了改进的安全-进展权衡。
🔬 方法详解
问题定义:论文旨在解决四足机器人在非结构化环境中安全运动的问题,尤其是在存在高速动态障碍物的情况下。现有方法要么依赖于计算量大的规划算法,导致反应速度慢;要么采用纯粹的反应式策略,但会牺牲长期目标和通过复杂地形的能力。因此,如何在保证安全性的前提下,实现快速响应和有效的目标导向运动是一个挑战。
核心思路:UEREBot的核心思路是将运动规划分解为两个层次:一个慢速的全局规划器,负责生成朝向目标的参考轨迹和威胁信息;以及一个快速的局部反应模块,负责根据威胁信息调整运动,以避免碰撞。通过分层结构,可以兼顾长期目标和即时安全性。
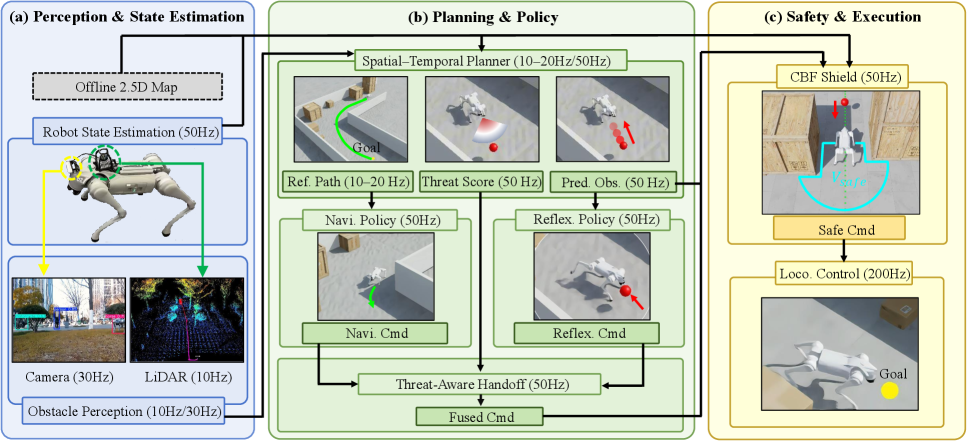
技术框架:UEREBot的整体框架包含以下几个主要模块:1) 时空规划器:生成参考轨迹和威胁信号。2) 威胁感知切换:融合导航和反射动作,生成标称命令。3) 控制障碍函数(CBF)屏蔽:作为最终的执行保障,确保运动的安全性。该框架将任务建模为约束最优控制问题,并使用CBF来保证安全性约束。
关键创新:UEREBot的关键创新在于其分层控制架构和威胁感知切换机制。传统方法通常采用单一的规划或反应式控制,而UEREBot通过分层结构实现了规划和反应的有效结合。威胁感知切换机制能够根据环境中的威胁程度,动态调整导航和避障动作的权重,从而实现更好的安全-进展权衡。
关键设计:时空规划器采用了一种基于优化的方法,考虑了地形约束和目标位置。威胁感知切换使用一个加权平均策略,根据威胁信号的大小,调整导航和避障动作的权重。控制障碍函数的设计需要仔细选择参数,以保证安全性和运动性能。具体参数设置和网络结构细节在论文中进行了详细描述(未知)。
🖼️ 关键图片

📊 实验亮点
UEREBot在Isaac Lab模拟和Unitree Go2四足机器人上的实验结果表明,它在避障成功率和运动稳定性方面优于基线方法。在复杂环境中,UEREBot能够成功避开高速动态障碍物,同时保持较高的目标进展。具体性能数据和提升幅度在论文中进行了详细展示(未知)。
🎯 应用场景
UEREBot技术可应用于搜救、巡检、物流等领域,尤其是在复杂、动态和非结构化的环境中。例如,在灾后救援中,机器人可以利用该技术在废墟中安全地搜索幸存者;在工业巡检中,机器人可以避开移动设备和人员,安全地执行任务。该研究有助于提升机器人在复杂环境中的自主性和适应性,具有重要的实际应用价值。
📄 摘要(原文)
Quadruped robots are increasingly deployed in unstructured environments. Safe locomotion in these settings requires long-horizon goal progress, passability over uneven terrain and static constraints, and collision avoidance against high-speed dynamic obstacles. A single system cannot fully satisfy all three objectives simultaneously: planning-based decisions can be too slow, while purely reactive decisions can sacrifice goal progress and passability. To resolve this conflict, we propose UEREBot (Unstructured-Environment Reflexive Evasion Robot), a hierarchical framework that separates slow planning from instantaneous reflexive evasion and coordinates them during execution. UEREBot formulates the task as a constrained optimal control problem blueprint. It adopts a spatial--temporal planner that provides reference guidance toward the goal and threat signals. It then uses a threat-aware handoff to fuse navigation and reflex actions into a nominal command, and a control barrier function shield as a final execution safeguard. We evaluate UEREBot in Isaac Lab simulation and deploy it on a Unitree Go2 quadruped equipped with onboard perception. Across diverse environments with complex static structure and high-speed dynamic obstacles, UEREBot achieves higher avoidance success and more stable locomotion while maintaining goal progress than representative baselines, demonstrating improved safety--progress trade-offs.