Realistic Synthetic Household Data Generation at Scale
作者: Siddharth Singh, Ifrah Idrees, Abraham Dauhajre
分类: cs.RO, cs.AI, cs.GR
发布日期: 2026-02-06
备注: Accepted at Agentic AI Benchmarks and Applications for Enterprise Tasks workshop at AAAI 2026
💡 一句话要点
提出一种可扩展的逼真家庭环境合成数据生成框架,用于具身智能研究。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 合成数据生成 具身智能 人机交互 家庭环境 双向耦合 自然语言提示 3D数据
📋 核心要点
- 现有合成数据框架难以建模人类行为与家庭环境之间的双向影响,限制了具身智能体的开发。
- 该论文提出一种生成框架,通过松散耦合人机交互和环境生成,模拟人类角色对环境的影响,以及环境对人机交互的塑造。
- 实验表明,生成的合成数据在统计上与真实世界数据集具有良好的一致性,且干预分析验证了双向耦合的有效性。
📝 摘要(中文)
本文提出了一种生成框架,用于大规模创建家庭数据集,以促进具身智能领域的研究,特别是开发能够进行环境推理和交互的交互式智能体。该框架通过松散耦合的长期人机交互和环境生成来模拟人类行为与家庭环境之间的双向影响。人类角色影响环境生成,而环境示意图和语义则塑造人机交互。生成的3D数据包含丰富的静态上下文(如对象和环境语义)以及随时间变化的人类和智能体行为。该工具允许用户通过自然语言提示定义数据集特征,并创建用户定义配置的变体,从而实现可扩展的数据生成。通过多模态嵌入和关键指标(余弦相似度、互信息增益、干预分析和迭代改进验证)进行统计评估,验证了框架的有效性。与真实世界数据集(HOMER)相比,余弦相似度为0.60,与合成数据集(Wang et al.)相比,余弦相似度为0.27。干预分析表明,年龄、组织和睡眠模式的变化具有统计学意义(p < 0.001),且效应量较大(Cohen's d = 0.51-1.12),证实了双向耦合将角色特征转化为可测量的环境和行为差异。这些贡献能够大规模地开发和测试家用智能设备。
🔬 方法详解
问题定义:现有方法在生成用于具身智能研究的家庭环境数据时,未能充分考虑人类行为与环境之间的双向影响。以往的框架主要关注生成长期人机交互的合成数据,但忽略了人类角色对环境的塑造,以及环境对人类行为的约束。这导致生成的环境数据不够逼真,难以用于训练具有真实世界交互能力的智能体。
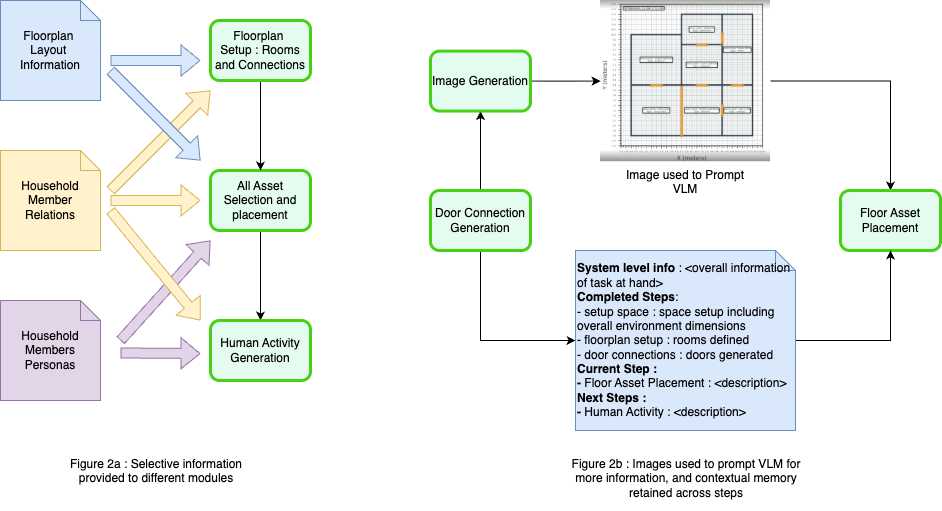
核心思路:该论文的核心思路是通过松散耦合的人机交互和环境生成,来模拟人类行为与家庭环境之间的双向影响。具体来说,首先根据人类角色(persona)的特征生成相应的家庭环境,然后利用生成的环境信息来塑造人机交互过程。这种双向耦合的设计能够生成更逼真、更符合实际情况的家庭环境数据。
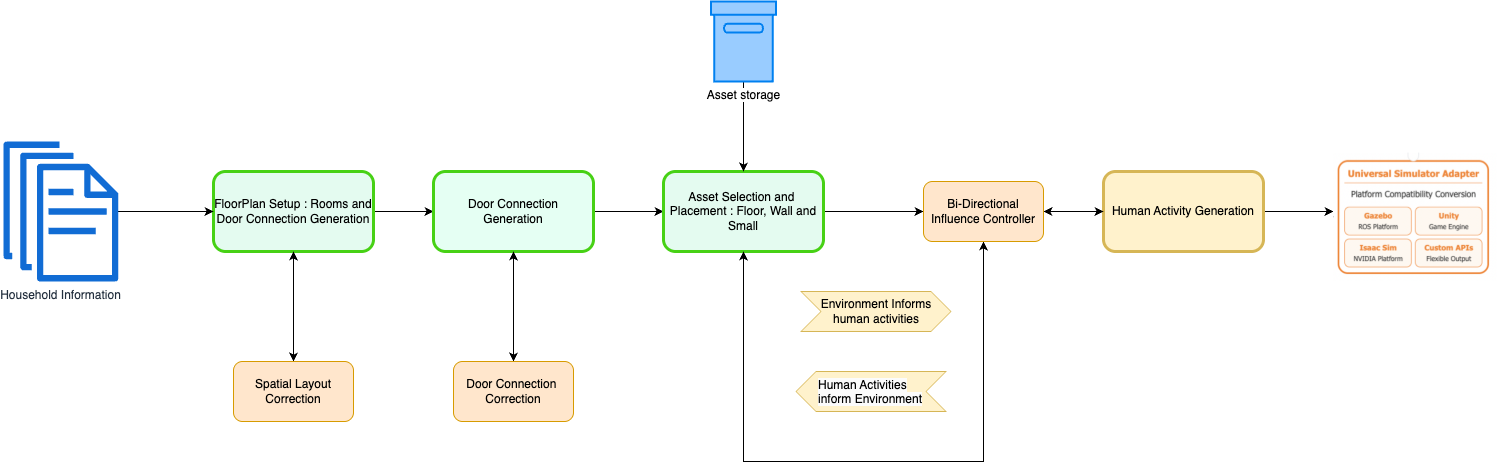
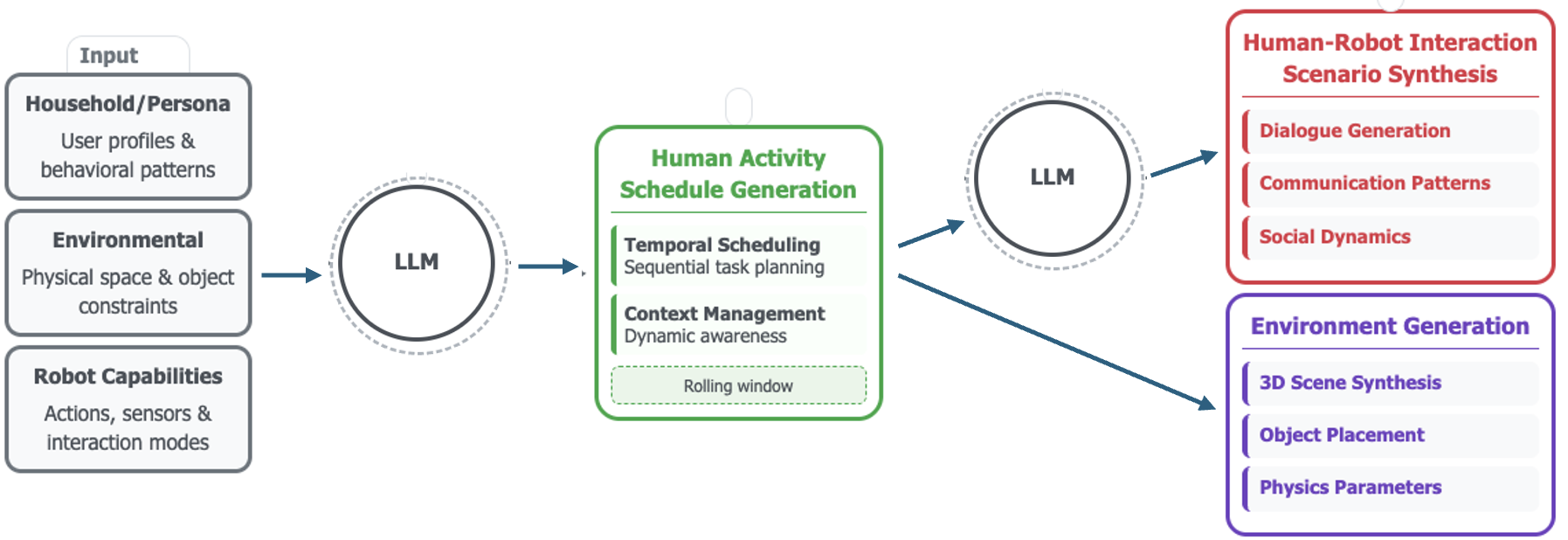
技术框架:该框架包含两个主要模块:环境生成模块和人机交互生成模块。环境生成模块根据用户提供的自然语言提示和人类角色信息,生成3D家庭环境数据,包括房间布局、物体摆放、语义信息等。人机交互生成模块则利用生成的环境数据,模拟人类和智能体在家庭环境中的交互行为,包括移动、操作物体、对话等。这两个模块通过松散耦合的方式进行协同工作,实现双向影响的模拟。
关键创新:该论文最重要的技术创新点在于提出了双向耦合的生成框架,能够模拟人类行为与家庭环境之间的相互影响。与现有方法相比,该框架能够生成更逼真、更符合实际情况的家庭环境数据,从而更好地支持具身智能领域的研究。此外,该框架还支持通过自然语言提示来定义数据集特征,提高了数据生成的灵活性和可扩展性。
关键设计:该框架的关键设计包括:1) 使用自然语言提示来控制环境生成过程,允许用户灵活地定义数据集特征;2) 采用多模态嵌入来表示环境和行为数据,方便进行统计分析和比较;3) 设计了干预分析方法,用于验证双向耦合的有效性。具体的参数设置、损失函数和网络结构等技术细节在论文中没有详细描述,属于未知信息。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该框架生成的合成数据与真实世界数据集(HOMER)具有较高的一致性,余弦相似度达到0.60。干预分析表明,改变年龄、组织和睡眠模式等角色特征,会对环境和行为产生显著影响(p < 0.001),且效应量较大(Cohen's d = 0.51-1.12),验证了双向耦合的有效性。与现有合成数据集(Wang et al.)相比,该框架生成的数据也表现出更好的真实性。
🎯 应用场景
该研究成果可应用于家用智能设备的开发和测试,例如智能家居助手、服务机器人等。通过使用该框架生成的合成数据,可以大规模地训练和评估智能体的环境感知、推理和交互能力,从而加速智能家居技术的普及和应用。此外,该框架还可以用于虚拟现实和游戏等领域,生成逼真的家庭环境。
📄 摘要(原文)
Advancements in foundation models have catalyzed research in Embodied AI to develop interactive agents capable of environmental reasoning and interaction. Developing such agents requires diverse, large-scale datasets. Prior frameworks generate synthetic data for long-term human-robot interactions but fail to model the bidirectional influence between human behavior and household environments. Our proposed generative framework creates household datasets at scale through loosely coupled generation of long-term human-robot interactions and environments. Human personas influence environment generation, while environment schematics and semantics shape human-robot interactions. The generated 3D data includes rich static context such as object and environment semantics, and temporal context capturing human and agent behaviors over extended periods. Our flexible tool allows users to define dataset characteristics via natural language prompts, enabling configuration of environment and human activity data through natural language specifications. The tool creates variations of user-defined configurations, enabling scalable data generation. We validate our framework through statistical evaluation using multi-modal embeddings and key metrics: cosine similarity, mutual information gain, intervention analysis, and iterative improvement validation. Statistical comparisons show good alignment with real-world datasets (HOMER) with cosine similarity (0.60), while synthetic datasets (Wang et al.) show moderate alignment (0.27). Intervention analysis across age, organization, and sleep pattern changes shows statistically significant effects (p < 0.001) with large effect sizes (Cohen's d = 0.51-1.12), confirming bidirectional coupling translates persona traits into measurable environmental and behavioral differences. These contributions enable development and testing of household smart devices at scale.