Consensus-based optimization (CBO): Towards Global Optimality in Robotics
作者: Xudong Sun, Armand Jordana, Massimo Fornasier, Jalal Etesami, Majid Khadiv
分类: cs.RO
发布日期: 2026-02-06
💡 一句话要点
提出基于共识的优化算法(CBO),用于解决机器人全局轨迹优化问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人 轨迹优化 全局优化 共识优化 零阶优化
📋 核心要点
- 现有机器人轨迹优化方法多为局部优化,依赖梯度估计,易陷入局部最优。
- 论文提出CBO算法,通过粒子间的共识机制,在一定条件下保证收敛到全局最优。
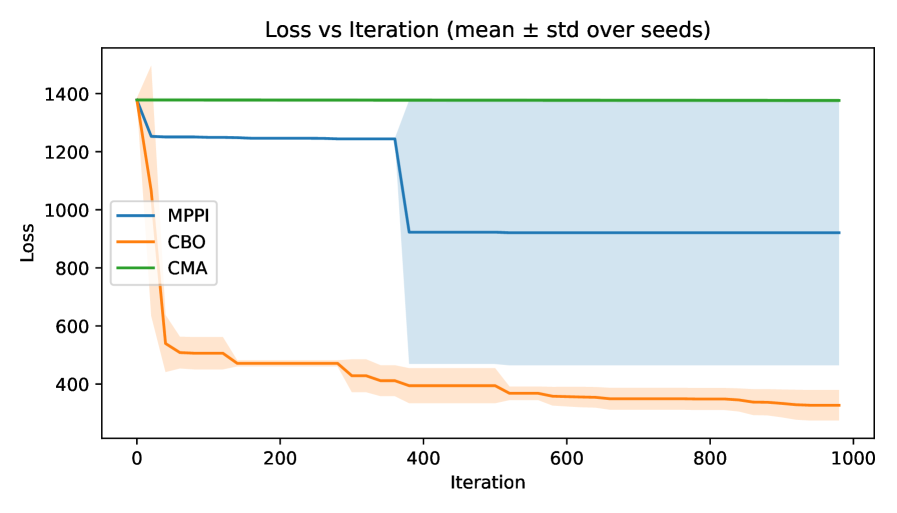
- 实验表明,CBO在长时程、欠驱动和高维轨迹优化问题上优于现有方法,成本更低。
📝 摘要(中文)
本文将基于共识的优化(CBO)引入机器人领域,用于解决机器人系统的最优轨迹和策略设计问题。现有方法(如MPPI、CEM和CMA-ES)本质上是局部优化方法,依赖于梯度估计。CBO在温和的假设下保证收敛到全局最优解。论文提供了理论分析和示例,阐述了CBO与现有方法的根本区别。为了验证CBO在机器人问题上的可扩展性,论文考虑了三个具有挑战性的轨迹优化场景:简单系统的长时程问题、高度欠驱动系统的动态平衡问题以及仅具有终端代价的高维问题。结果表明,在所有三个具有挑战性的场景中,CBO都能够获得比现有方法更低的成本。这为研究机器人中的全局轨迹优化开辟了一个新的框架。
🔬 方法详解
问题定义:论文旨在解决机器人轨迹优化问题,现有方法如MPPI、CEM、CMA-ES等,依赖于梯度估计,容易陷入局部最优,难以保证全局最优性。尤其是在复杂、高维的机器人系统中,局部优化方法的局限性更加明显。
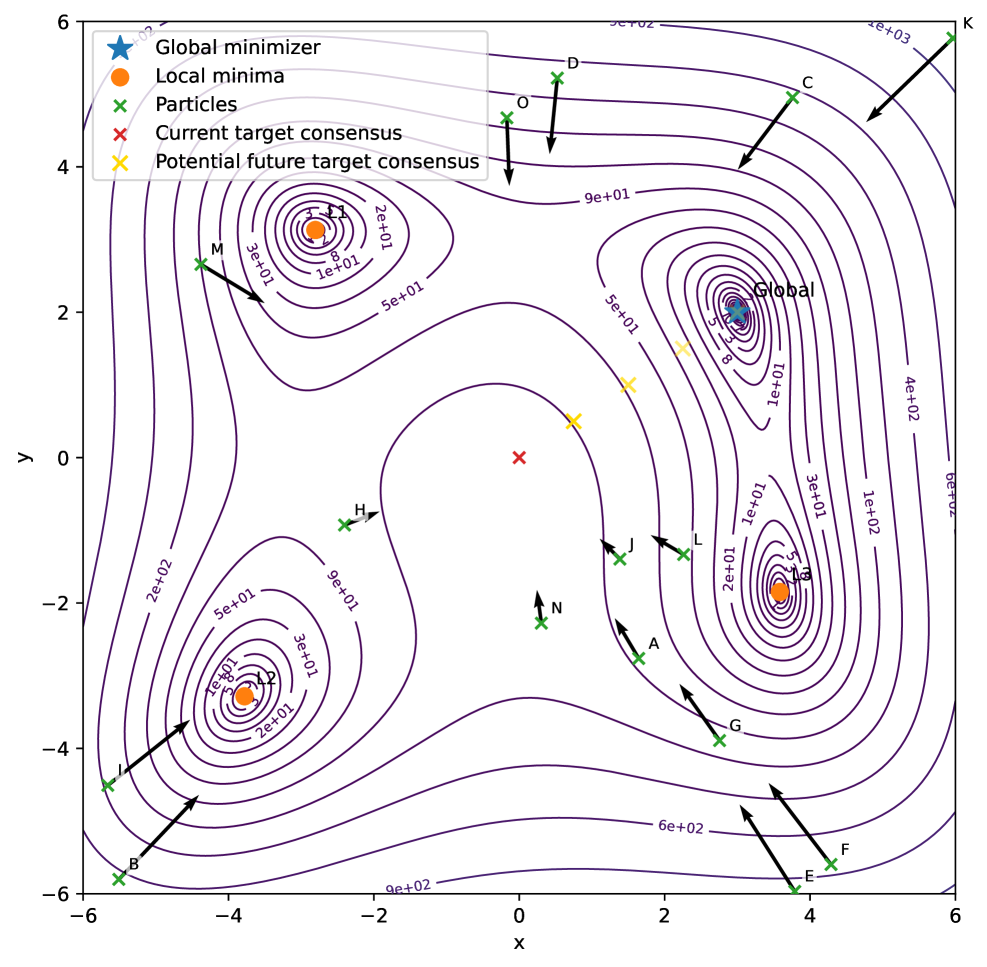
核心思路:CBO的核心思路是利用多个粒子(或样本)在搜索空间中探索,并通过共识机制引导粒子向全局最优解收敛。每个粒子根据其自身的适应度(即目标函数值)以及其他粒子的位置信息进行更新,从而实现协同搜索。这种基于共识的策略能够有效地避免陷入局部最优,并提高找到全局最优解的概率。
技术框架:CBO算法的整体流程如下:1) 初始化一组粒子,每个粒子代表一个可能的轨迹或策略。2) 评估每个粒子的适应度,即计算其对应的目标函数值。3) 根据粒子的适应度和其他粒子的位置信息,计算每个粒子的更新方向和步长。4) 更新粒子的位置。5) 重复步骤2-4,直到满足收敛条件或达到最大迭代次数。
关键创新:CBO最重要的技术创新在于其基于共识的更新机制。与传统的基于梯度的方法不同,CBO不依赖于梯度信息,而是通过粒子间的相互作用来引导搜索过程。这种机制使得CBO能够有效地探索复杂的搜索空间,并避免陷入局部最优。此外,CBO在一定条件下可以保证收敛到全局最优解,这在理论上优于现有的局部优化方法。
关键设计:CBO的关键设计包括:1) 粒子的初始化策略,例如随机初始化或基于先验知识的初始化。2) 适应度函数的选择,需要根据具体的机器人问题进行设计。3) 共识机制的实现方式,例如可以采用加权平均或其他更复杂的策略。4) 收敛条件的设定,例如可以根据目标函数值的变化或粒子位置的分布来判断是否收敛。论文中具体参数设置未知。
🖼️ 关键图片

📊 实验亮点
论文在三个具有挑战性的机器人轨迹优化场景中验证了CBO算法的有效性。实验结果表明,CBO在长时程问题、欠驱动系统和高维问题上均优于现有方法,能够获得更低的成本。具体性能提升数据未知,但实验结果表明CBO在全局优化方面具有显著优势。
🎯 应用场景
CBO算法在机器人轨迹优化、运动规划、强化学习等领域具有广泛的应用前景。它可以用于解决复杂环境下的机器人导航、操作臂的轨迹生成、以及无人机的飞行控制等问题。该研究为机器人全局轨迹优化提供了一种新的思路,有望提升机器人系统的性能和鲁棒性。
📄 摘要(原文)
Zero-order optimization has recently received significant attention for designing optimal trajectories and policies for robotic systems. However, most existing methods (e.g., MPPI, CEM, and CMA-ES) are local in nature, as they rely on gradient estimation. In this paper, we introduce consensus-based optimization (CBO) to robotics, which is guaranteed to converge to a global optimum under mild assumptions. We provide theoretical analysis and illustrative examples that give intuition into the fundamental differences between CBO and existing methods. To demonstrate the scalability of CBO for robotics problems, we consider three challenging trajectory optimization scenarios: (1) a long-horizon problem for a simple system, (2) a dynamic balance problem for a highly underactuated system, and (3) a high-dimensional problem with only a terminal cost. Our results show that CBO is able to achieve lower costs with respect to existing methods on all three challenging settings. This opens a new framework to study global trajectory optimization in robotics.