SURE: Safe Uncertainty-Aware Robot-Environment Interaction using Trajectory Optimization
作者: Zhuocheng Zhang, Haizhou Zhao, Xudong Sun, Aaron M. Johnson, Majid Khadiv
分类: cs.RO
发布日期: 2026-02-06
💡 一句话要点
SURE:基于轨迹优化的安全、不确定性感知机器人-环境交互
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 轨迹优化 机器人控制 接触交互 不确定性建模 鲁棒性 机器人操作 动力学
📋 核心要点
- 接触交互机器人任务中,传统轨迹优化方法假设接触事件是确定的,这限制了其在实际环境中的鲁棒性和适应性。
- SURE框架通过允许多个轨迹从冲击前状态分支,并在后续汇合,显式考虑接触时间的不确定性,提升了鲁棒性。
- 实验表明,SURE在倒立摆平衡和鸡蛋捕捉任务中,分别将成功率平均提高了21.6%和40%,验证了其有效性。
📝 摘要(中文)
涉及接触交互的机器人任务由于动力学的不连续性,给轨迹优化带来了重大挑战。传统的公式通常假设确定性的接触事件,这限制了在实际环境中的鲁棒性和适应性。本文提出了一种鲁棒的轨迹优化框架SURE,它显式地考虑了接触时间的不确定性。通过允许多个轨迹从可能的冲击前状态分支,并在之后重新汇合到共享轨迹,SURE在一个统一的优化框架内实现了鲁棒性和计算效率。我们在两个具有未知冲击时间的代表性任务上评估了SURE。在涉及不确定墙体位置的倒立摆平衡任务中,当控制过程中启用分支切换时,SURE的成功率平均提高了21.6%。在使用机器人机械臂的鸡蛋捕捉实验中,SURE的成功率提高了40%。这些结果表明,与传统的标称公式相比,SURE显著提高了鲁棒性。
🔬 方法详解
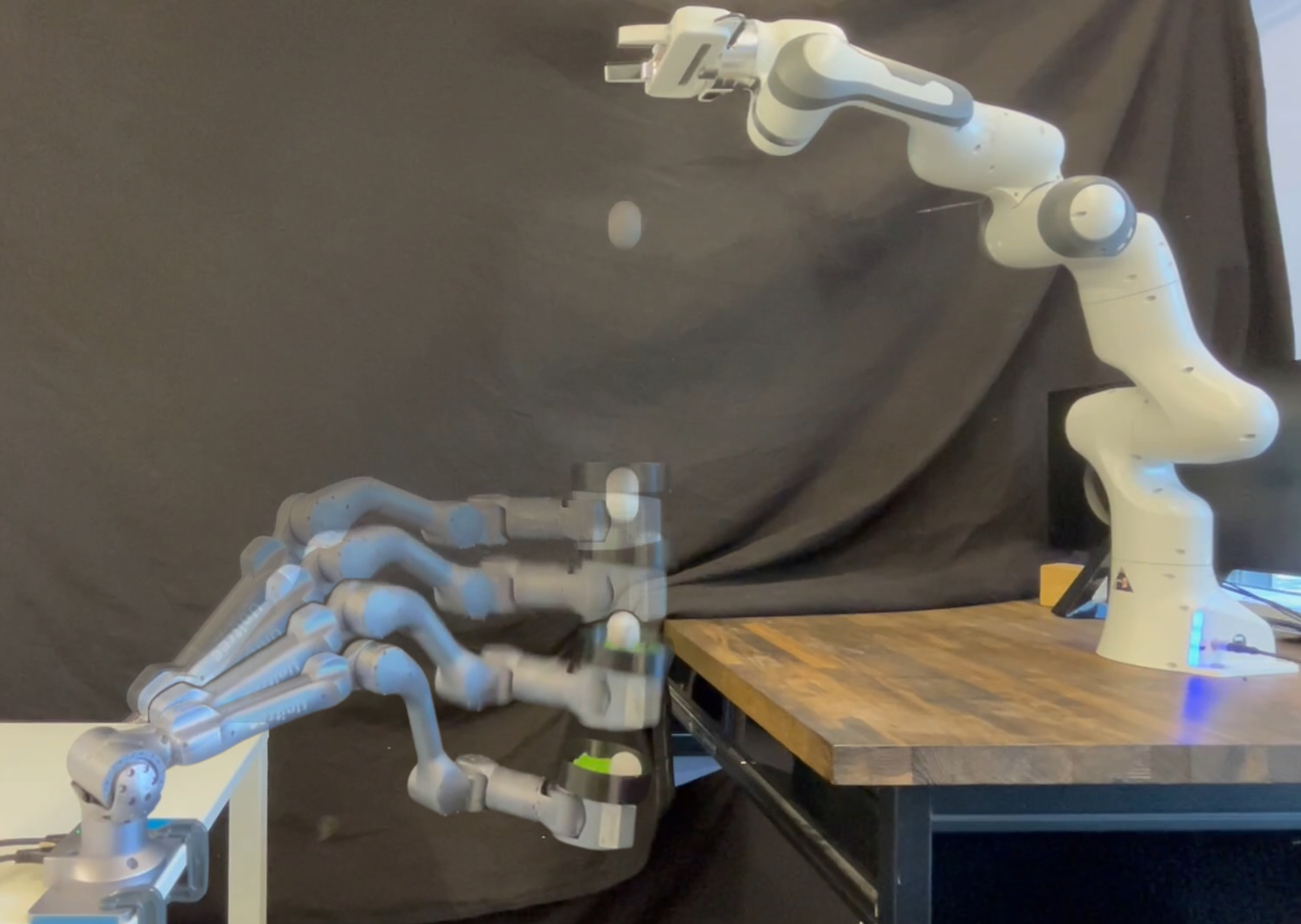
问题定义:论文旨在解决机器人与环境进行接触交互时,由于接触时间不确定性导致的轨迹优化问题。现有方法通常假设接触事件是确定性的,这在实际环境中难以保证,导致鲁棒性较差。例如,倒立摆与墙壁的碰撞时间、机械臂抓取鸡蛋的接触时间等都存在不确定性,传统方法难以处理这些情况。
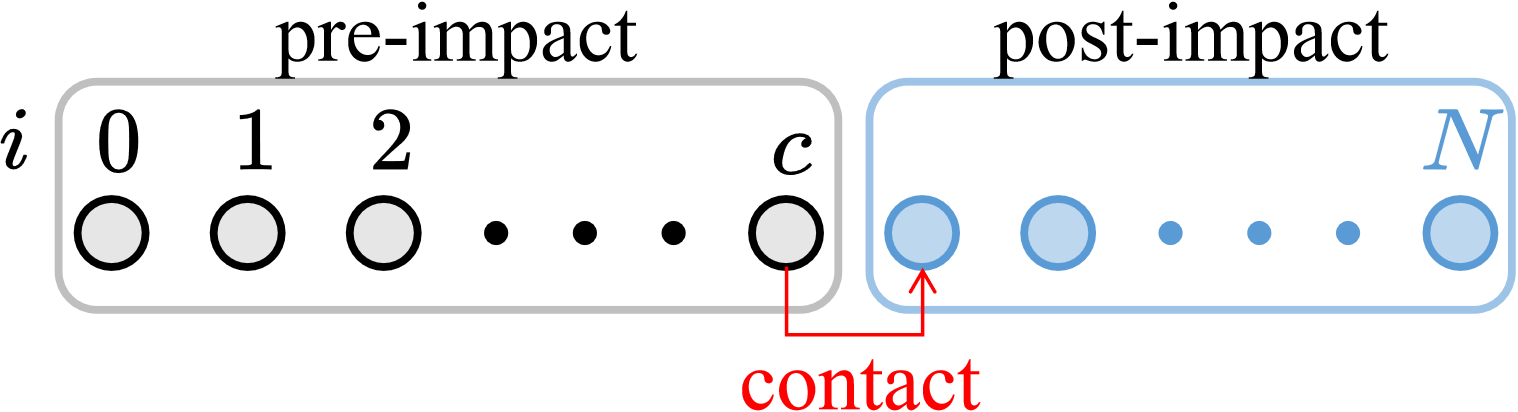
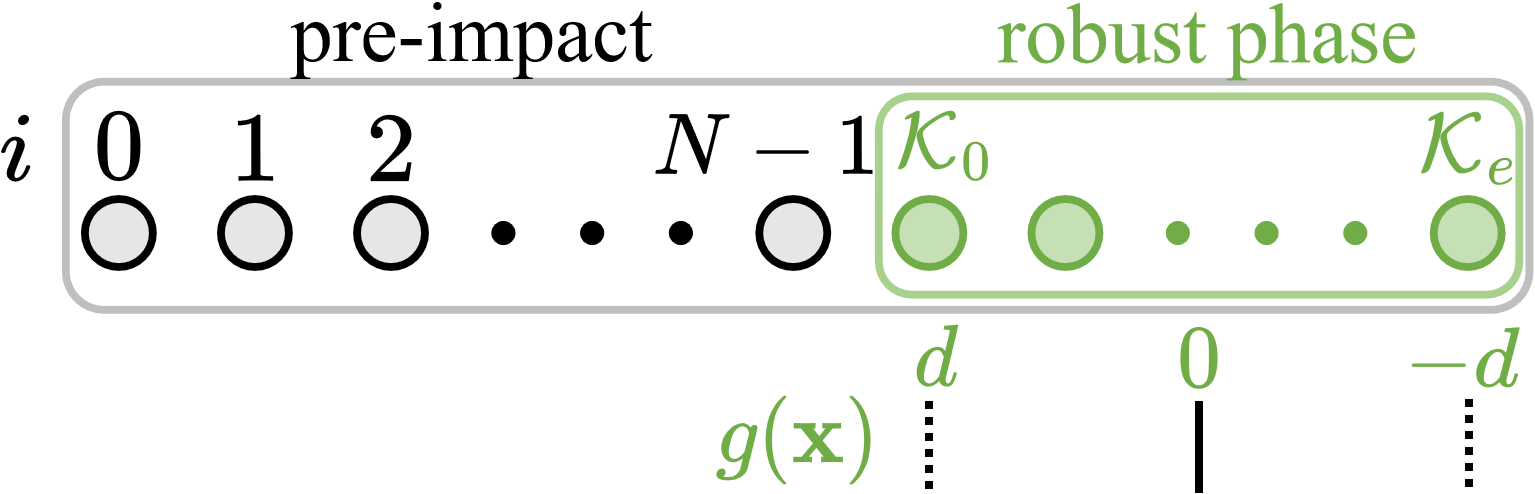
核心思路:SURE的核心思路是允许轨迹在可能发生冲击前的位置进行分支,形成多个候选轨迹,分别对应不同的接触时间假设。这些分支轨迹在后续某个时间点重新汇合,形成一个共享轨迹。通过这种方式,SURE能够同时考虑多种可能的接触情况,从而提高鲁棒性。
技术框架:SURE的整体框架包含以下几个主要阶段:1) 初始化:生成初始轨迹;2) 分支:在可能发生冲击前的位置,根据接触时间的不确定性,生成多个分支轨迹;3) 优化:对所有分支轨迹进行优化,目标是最小化成本函数,同时考虑动力学约束和接触约束;4) 汇合:在后续某个时间点,将所有分支轨迹汇合到共享轨迹;5) 控制:根据优化后的轨迹,控制机器人执行任务。
关键创新:SURE最重要的创新点在于其分支-汇合的轨迹优化策略。与传统方法只优化一条轨迹不同,SURE同时优化多条轨迹,从而能够更好地应对接触时间的不确定性。这种方法在保证鲁棒性的同时,也具有较高的计算效率,因为它避免了对所有可能的接触情况进行穷举搜索。
关键设计:SURE的关键设计包括:1) 分支点的选择:需要根据任务的特点,选择合适的冲击前状态作为分支点;2) 分支轨迹的数量:需要根据接触时间的不确定性范围,确定合适的分支轨迹数量;3) 成本函数的设计:需要设计合适的成本函数,以平衡轨迹的平滑性、动力学可行性和接触约束;4) 汇合点的选择:需要选择合适的汇合点,以保证轨迹的连续性和可执行性。
🖼️ 关键图片
📊 实验亮点
SURE在倒立摆平衡任务中,当启用分支切换时,成功率平均提高了21.6%。在鸡蛋捕捉实验中,SURE的成功率提高了40%。这些实验结果表明,SURE能够显著提高机器人在接触交互任务中的鲁棒性,优于传统的标称轨迹优化方法。实验验证了SURE在处理接触时间不确定性方面的有效性。
🎯 应用场景
SURE框架可应用于各种涉及机器人与环境接触交互的场景,例如:机器人操作、装配、抓取、运动技能学习等。该方法能够提高机器人在未知或不确定环境中的鲁棒性和适应性,使其能够更好地完成复杂任务。未来,SURE有望应用于工业自动化、服务机器人等领域,提升机器人的智能化水平。
📄 摘要(原文)
Robotic tasks involving contact interactions pose significant challenges for trajectory optimization due to discontinuous dynamics. Conventional formulations typically assume deterministic contact events, which limit robustness and adaptability in real-world settings. In this work, we propose SURE, a robust trajectory optimization framework that explicitly accounts for contact timing uncertainty. By allowing multiple trajectories to branch from possible pre-impact states and later rejoin a shared trajectory, SURE achieves both robustness and computational efficiency within a unified optimization framework. We evaluate SURE on two representative tasks with unknown impact times. In a cart-pole balancing task involving uncertain wall location, SURE achieves an average improvement of 21.6% in success rate when branch switching is enabled during control. In an egg-catching experiment using a robotic manipulator, SURE improves the success rate by 40%. These results demonstrate that SURE substantially enhances robustness compared to conventional nominal formulations.