DynaRetarget: Dynamically-Feasible Retargeting using Sampling-Based Trajectory Optimization
作者: Victor Dhedin, Ilyass Taouil, Shafeef Omar, Dian Yu, Kun Tao, Angela Dai, Majid Khadiv
分类: cs.RO
发布日期: 2026-02-06
💡 一句话要点
DynaRetarget:基于采样的轨迹优化实现动态可行的人形运动重定向
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 运动重定向 轨迹优化 人形机器人 动态可行性 采样算法
📋 核心要点
- 现有运动重定向方法难以保证人形机器人的运动动态可行性,尤其是在长时程任务中。
- DynaRetarget采用基于采样的轨迹优化(SBTO)框架,逐步优化轨迹,确保运动的动态可行性。
- 实验表明,DynaRetarget在重定向人形-物体交互演示方面优于现有技术,并能泛化到不同的物体属性。
📝 摘要(中文)
本文提出DynaRetarget,一个完整的人类运动重定向到人形机器人控制策略的流程。DynaRetarget的核心是一个新颖的基于采样的轨迹优化(SBTO)框架,该框架将不完善的运动学轨迹细化为动态可行的运动。SBTO逐步推进优化范围,从而能够对长时程任务的整个轨迹进行优化。我们通过成功地将数百个人形-物体交互演示进行重定向,验证了DynaRetarget的有效性,并实现了比现有技术更高的成功率。该框架还可以使用相同的跟踪目标泛化到不同的物体属性,例如质量、大小和几何形状。这种稳健地重定向各种演示的能力为生成大规模人形机器人操作轨迹的合成数据集打开了大门,解决了真实世界数据收集中的一个主要瓶颈。
🔬 方法详解
问题定义:论文旨在解决将人类运动学轨迹重定向到人形机器人控制策略的问题,尤其关注如何保证重定向后运动的动态可行性。现有的运动重定向方法通常难以满足人形机器人的动力学约束,导致重定向后的运动无法在真实机器人上执行,尤其是在长时程任务中,误差会不断累积。
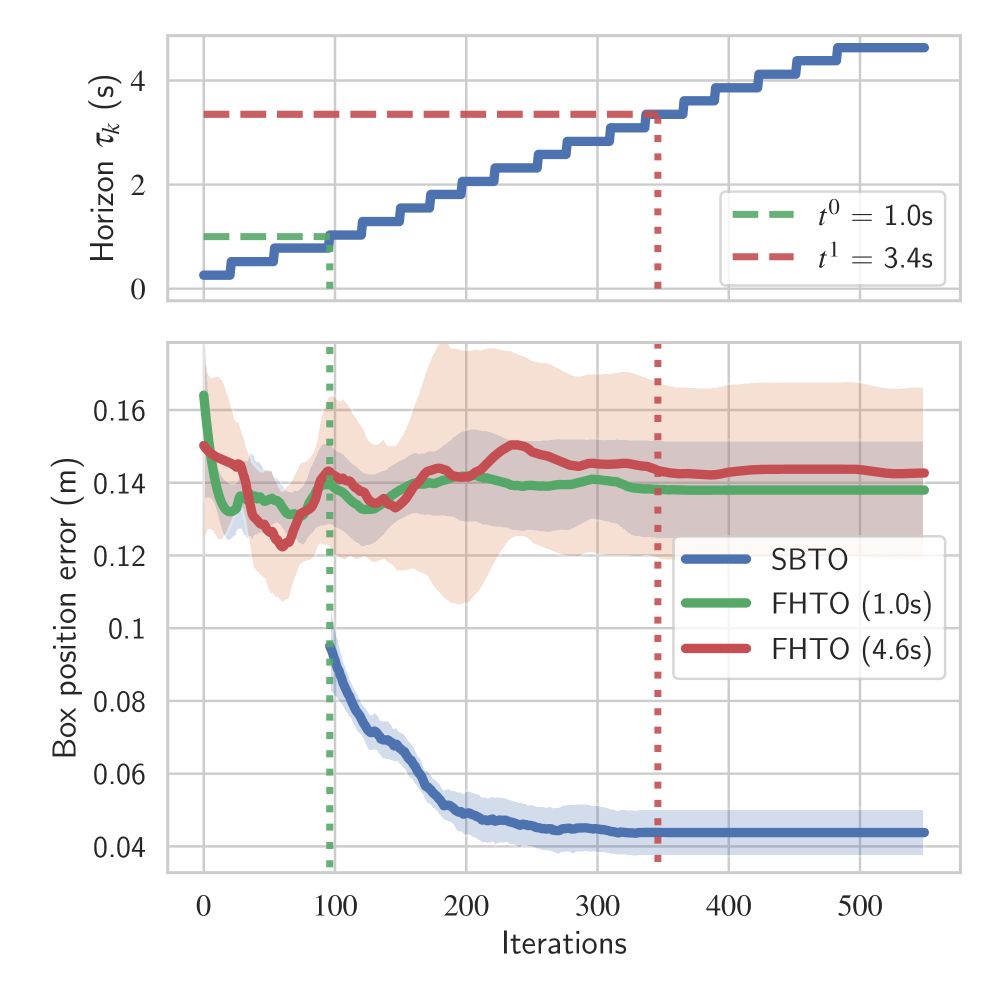
核心思路:论文的核心思路是使用基于采样的轨迹优化(Sampling-Based Trajectory Optimization, SBTO)框架,将不完美的运动学轨迹逐步细化为动态可行的运动。通过增量式地扩展优化范围,SBTO能够有效地处理长时程任务,并确保整个轨迹的动态可行性。这种方法避免了直接优化整个轨迹的复杂性,而是通过逐步优化来逼近最优解。
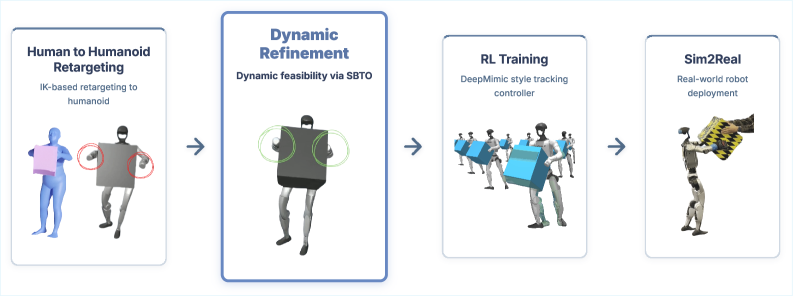
技术框架:DynaRetarget的整体框架包含以下几个主要步骤:首先,从人类运动数据中提取运动学轨迹。然后,使用SBTO框架对这些轨迹进行优化,使其满足人形机器人的动力学约束。SBTO框架的核心是一个迭代优化过程,每次迭代都会在当前轨迹的基础上采样新的轨迹片段,并使用优化器选择最佳的片段来更新轨迹。这个过程会不断重复,直到轨迹收敛到动态可行的解。
关键创新:DynaRetarget的关键创新在于其SBTO框架。与传统的轨迹优化方法相比,SBTO通过采样的方式探索解空间,能够更有效地处理高维状态空间和复杂的动力学约束。此外,SBTO的增量式优化方式使其能够处理长时程任务,而不会陷入局部最优解。
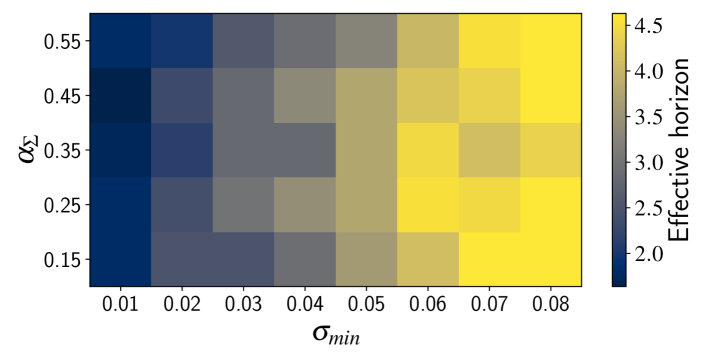
关键设计:SBTO框架的关键设计包括:1) 采样策略:论文采用了一种基于高斯过程的采样策略,能够有效地探索解空间。2) 优化器:论文使用了一种基于序列二次规划(SQP)的优化器,能够快速有效地求解优化问题。3) 损失函数:论文设计了一个包含跟踪误差、动力学约束和碰撞避免的损失函数,用于指导轨迹优化。
🖼️ 关键图片
📊 实验亮点
实验结果表明,DynaRetarget在重定向人形-物体交互演示方面取得了显著的成果,成功率高于现有技术。具体而言,DynaRetarget能够成功地将数百个人形-物体交互演示进行重定向,并且能够泛化到不同的物体属性,例如质量、大小和几何形状。这表明DynaRetarget具有很强的鲁棒性和泛化能力。
🎯 应用场景
DynaRetarget可应用于机器人运动规划、人机协作、虚拟现实等领域。通过将人类运动数据重定向到人形机器人,可以使机器人能够模仿人类的动作,从而实现更自然、更高效的人机交互。此外,DynaRetarget还可以用于生成大规模的机器人训练数据,加速机器人学习算法的开发。
📄 摘要(原文)
In this paper, we introduce DynaRetarget, a complete pipeline for retargeting human motions to humanoid control policies. The core component of DynaRetarget is a novel Sampling-Based Trajectory Optimization (SBTO) framework that refines imperfect kinematic trajectories into dynamically feasible motions. SBTO incrementally advances the optimization horizon, enabling optimization over the entire trajectory for long-horizon tasks. We validate DynaRetarget by successfully retargeting hundreds of humanoid-object demonstrations and achieving higher success rates than the state of the art. The framework also generalizes across varying object properties, such as mass, size, and geometry, using the same tracking objective. This ability to robustly retarget diverse demonstrations opens the door to generating large-scale synthetic datasets of humanoid loco-manipulation trajectories, addressing a major bottleneck in real-world data collection.