Crowd-FM: Learned Optimal Selection of Conditional Flow Matching-generated Trajectories for Crowd Navigation
作者: Antareep Singha, Laksh Nanwani, Mathai Mathew P., Samkit Jain, Phani Teja Singamaneni, Arun Kumar Singh, K. Madhava Krishna
分类: cs.RO
发布日期: 2026-02-06
备注: Accepted at IEEE ICRA 2026. Authors Antareep Singha and Laksh Nanwani have equal contributions
💡 一句话要点
Crowd-FM:基于条件流匹配的轨迹选择方法,用于人群导航
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 人群导航 条件流匹配 轨迹规划 机器人 人机交互
📋 核心要点
- 现有方法在密集人群中进行机器人导航时,难以保证安全性和计算效率,同时缺乏人类相似性。
- Crowd-FM通过学习条件流匹配(CFM)策略生成无碰撞轨迹基元,并学习评分函数评估轨迹的人类相似度。
- 实验表明,Crowd-FM在成功率上优于现有学习方法,并能通过推理时优化超越基于优化的规划方法。
📝 摘要(中文)
本文提出了一种名为Crowd-FM的基于学习的方法,旨在解决密集、非结构化人群环境中移动机器人的安全和计算高效的局部规划问题,并提高机器人在人类环境中的接受度。该方法包含两个创新组件。首先,在最优控制轨迹数据集上训练条件流匹配(CFM)策略,以学习机器人可以在任何给定场景中选择的一组无碰撞基元。所选的最优控制求解器可以生成多模态无碰撞轨迹,从而使CFM策略能够学习各种动作。其次,在人类演示轨迹数据集上学习一个评分函数,该函数为流基元提供人类相似度评分。在推理时,计算最优轨迹需要选择得分最高的轨迹。实验结果表明,Crowd-FM策略能够产生比现有基于学习的基线更高的成功率的无碰撞导航。此外,通过推理时细化,该方法甚至可以优于昂贵的基于优化的规划方法。最后,验证了评分网络可以选择比手动设计的成本函数更接近专家数据的轨迹。
🔬 方法详解
问题定义:在拥挤的、非结构化的人群环境中,移动机器人需要安全且计算高效地进行局部路径规划。现有的方法要么计算成本高昂,要么无法保证安全性,或者生成的轨迹不具备人类相似性,导致机器人在人群中的接受度较低。
核心思路:Crowd-FM的核心思路是利用学习的方法,首先通过条件流匹配(CFM)学习一组无碰撞的轨迹基元,然后学习一个评分函数来评估这些轨迹基元的人类相似度。在实际应用中,选择评分最高的轨迹基元作为机器人的运动轨迹,从而实现安全、高效且具有人类相似性的导航。
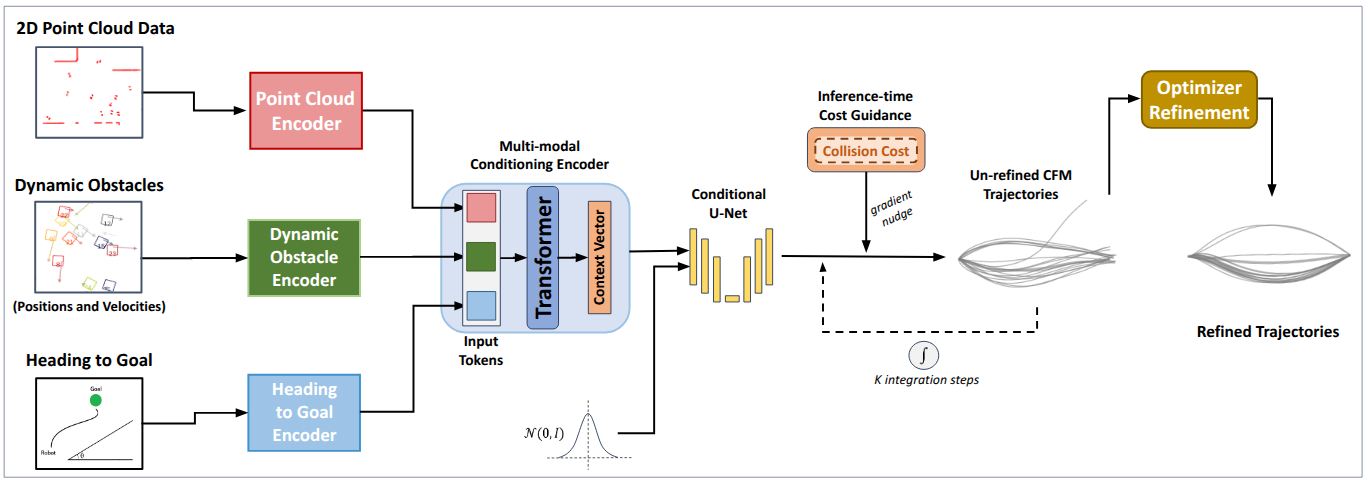
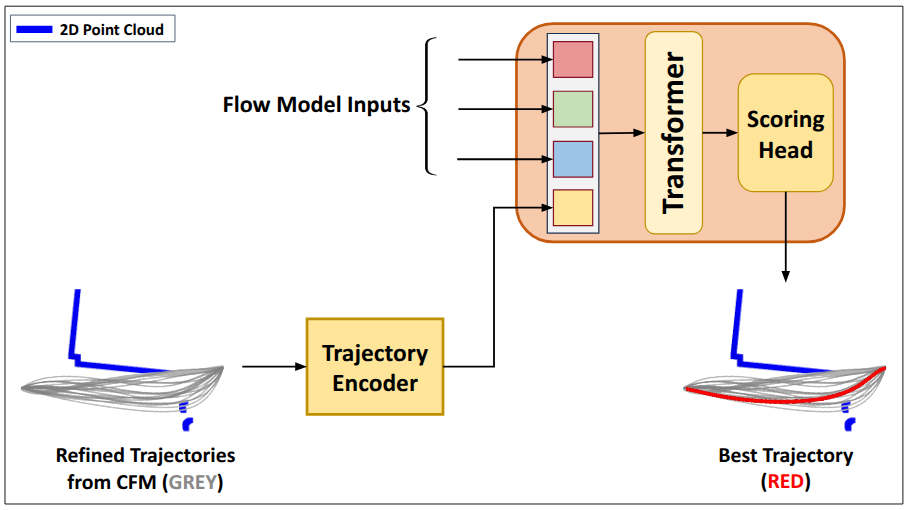
技术框架:Crowd-FM包含两个主要模块:1) 基于条件流匹配(CFM)的轨迹生成模块:该模块通过在最优控制轨迹数据集上训练CFM策略,学习一组无碰撞的轨迹基元。最优控制求解器负责生成多模态的无碰撞轨迹,为CFM策略提供多样化的学习样本。2) 基于评分函数的轨迹选择模块:该模块通过在人类演示轨迹数据集上学习一个评分函数,评估轨迹基元的人类相似度。在推理阶段,选择评分最高的轨迹基元作为机器人的运动轨迹。
关键创新:Crowd-FM的关键创新在于将条件流匹配(CFM)与人类相似度评分函数相结合,用于人群导航。与传统的基于优化的方法相比,Crowd-FM具有更高的计算效率;与现有的基于学习的方法相比,Crowd-FM能够生成更安全、更具有人类相似性的轨迹。
关键设计:CFM策略的网络结构和损失函数的设计是关键。评分函数的训练数据来自人类演示轨迹,损失函数的设计目标是使评分函数能够准确地评估轨迹的人类相似度。此外,推理时的轨迹细化步骤可以进一步提高轨迹的质量。
🖼️ 关键图片
📊 实验亮点
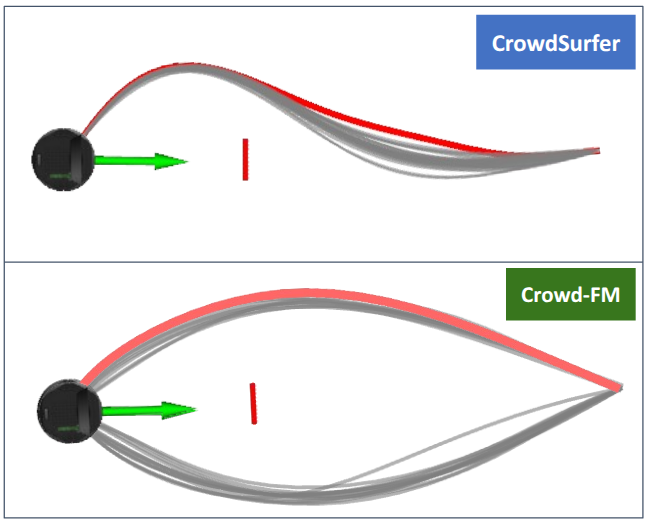
Crowd-FM在人群导航任务中取得了显著的性能提升。实验结果表明,仅使用CFM策略即可实现比现有基于学习的基线更高的无碰撞导航成功率。通过推理时的轨迹细化,Crowd-FM甚至可以超越计算成本高昂的基于优化的规划方法。此外,评分网络能够选择比手动设计的成本函数更接近专家数据的轨迹,验证了其有效性。
🎯 应用场景
Crowd-FM可应用于各种需要机器人在拥挤人群中安全导航的场景,例如:商场、机场、火车站等公共场所的引导机器人,医院、养老院等场所的辅助机器人,以及自动驾驶汽车在城市道路上的行驶。该研究有助于提高机器人在人类环境中的接受度,并促进人机协作的发展。
📄 摘要(原文)
Safe and computationally efficient local planning for mobile robots in dense, unstructured human crowds remains a fundamental challenge. Moreover, ensuring that robot trajectories are similar to how a human moves will increase the acceptance of the robot in human environments. In this paper, we present Crowd-FM, a learning-based approach to address both safety and human-likeness challenges. Our approach has two novel components. First, we train a Conditional Flow-Matching (CFM) policy over a dataset of optimally controlled trajectories to learn a set of collision-free primitives that a robot can choose at any given scenario. The chosen optimal control solver can generate multi-modal collision-free trajectories, allowing the CFM policy to learn a diverse set of maneuvers. Secondly, we learn a score function over a dataset of human demonstration trajectories that provides a human-likeness score for the flow primitives. At inference time, computing the optimal trajectory requires selecting the one with the highest score. Our approach improves the state-of-the-art by showing that our CFM policy alone can produce collision-free navigation with a higher success rate than existing learning-based baselines. Furthermore, when augmented with inference-time refinement, our approach can outperform even expensive optimisation-based planning approaches. Finally, we validate that our scoring network can select trajectories closer to the expert data than a manually designed cost function.