RAPID: Reconfigurable, Adaptive Platform for Iterative Design
作者: Zi Yin, Fanhong Li, Shurui Zheng, Jia Liu
分类: cs.RO, cs.AI
发布日期: 2026-02-06
💡 一句话要点
RAPID:用于迭代设计的可重构自适应机器人平台
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人平台 可重构系统 模块化设计 自适应控制 机器人操作
📋 核心要点
- 现有机器人操作策略开发迭代缓慢,末端执行器微小改动需大量重新配置。
- RAPID平台通过模块化硬件和物理掩码软件,实现快速重构和自适应。
- 实验表明,RAPID显著减少了多模态配置设置时间,并支持运行时传感器热插拔。
📝 摘要(中文)
机器人操作策略的开发是迭代和假设驱动的,研究人员通过真实世界的数据收集和训练来测试触觉传感、夹爪几何形状和传感器放置。然而,即使是末端执行器的微小变化也通常需要机械重新装配和系统重新集成,从而减慢了迭代速度。我们提出了RAPID,一个全栈可重构平台,旨在减少这种摩擦。RAPID围绕一个免工具、模块化硬件架构构建,该架构统一了手持数据收集和机器人部署,以及一个匹配的软件栈,该软件栈通过源自USB事件的驱动程序级物理掩码来保持对底层硬件配置的实时感知。这种模块化硬件架构将重新配置减少到几秒钟,并使系统的多模态消融研究成为可能,允许研究人员在没有重复系统启动的情况下扫描不同的夹爪和传感配置。物理掩码将模态存在作为显式运行时信号公开,从而在传感器热插拔事件下实现自动配置和优雅降级,因此策略可以在物理添加或移除传感器时继续执行。以系统为中心的实验表明,与传统工作流程相比,RAPID将多模态配置的设置时间减少了两个数量级,并在运行时传感器热拔插事件下保持策略执行。硬件设计、驱动程序和软件栈已在https://rapid-kit.github.io/上开源。
🔬 方法详解
问题定义:现有机器人操作策略开发流程中,对机器人末端执行器进行调整(例如更换夹爪、调整传感器位置等)需要耗费大量时间进行机械重新装配和系统重新集成。这严重阻碍了研究人员快速迭代和验证新的操作策略,特别是对于需要测试多种传感器组合和配置的多模态机器人系统。
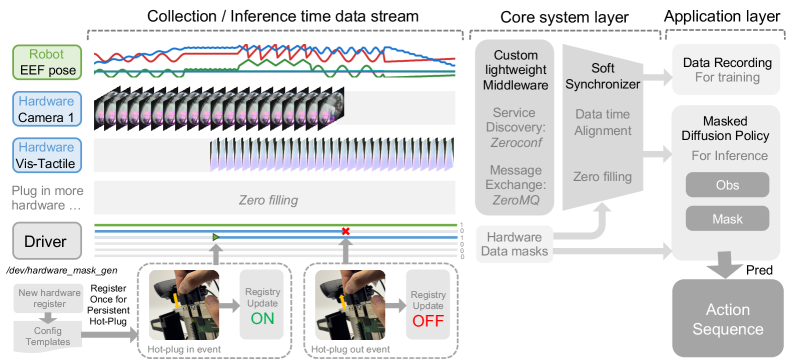
核心思路:RAPID的核心思路是通过模块化和可重构的硬件设计,以及相应的软件支持,实现机器人系统的快速配置和自适应。硬件方面,采用免工具的模块化设计,使得更换和调整末端执行器组件变得简单快捷。软件方面,通过物理掩码(Physical Mask)实时感知硬件配置的变化,并自动调整系统参数,从而实现即插即用的功能。
技术框架:RAPID平台包含以下主要模块: 1. 模块化硬件架构:采用统一的接口和免工具连接方式,支持快速更换和组合不同的传感器和夹爪。 2. 物理掩码(Physical Mask):一个驱动程序级别的抽象层,通过监听USB事件来实时感知硬件配置的变化。 3. 自适应软件栈:根据物理掩码提供的硬件配置信息,自动配置系统参数,并支持传感器热插拔和优雅降级。
关键创新:RAPID的关键创新在于将硬件的模块化设计与软件的自适应能力相结合,实现了机器人系统的快速重构和自适应。与传统的机器人系统相比,RAPID无需手动配置和重新集成,大大缩短了开发周期,并提高了研究效率。
关键设计: 1. 模块化硬件接口:采用标准化的接口,例如USB,方便连接各种传感器和执行器。 2. 物理掩码的实现:通过监听USB设备的连接和断开事件,实时更新硬件配置信息。 3. 自适应配置算法:根据物理掩码提供的硬件配置信息,自动调整传感器参数和控制策略。
🖼️ 关键图片


📊 实验亮点
实验结果表明,RAPID平台将多模态配置的设置时间减少了两个数量级,与传统工作流程相比,大幅提升了效率。此外,RAPID还能够在运行时传感器热拔插事件下保持策略的正常执行,展示了其强大的自适应能力。这些实验结果验证了RAPID平台的有效性和实用性。
🎯 应用场景
RAPID平台可广泛应用于机器人操作、自动化装配、智能制造等领域。它能够加速机器人系统的开发和部署,降低开发成本,并提高系统的灵活性和适应性。例如,在柔性制造场景中,RAPID可以帮助机器人快速适应不同的生产任务,实现自动化生产线的快速切换。此外,该平台还可以用于机器人教育和研究,为学生和研究人员提供一个便捷的实验平台。
📄 摘要(原文)
Developing robotic manipulation policies is iterative and hypothesis-driven: researchers test tactile sensing, gripper geometries, and sensor placements through real-world data collection and training. Yet even minor end-effector changes often require mechanical refitting and system re-integration, slowing iteration. We present RAPID, a full-stack reconfigurable platform designed to reduce this friction. RAPID is built around a tool-free, modular hardware architecture that unifies handheld data collection and robot deployment, and a matching software stack that maintains real-time awareness of the underlying hardware configuration through a driver-level Physical Mask derived from USB events. This modular hardware architecture reduces reconfiguration to seconds and makes systematic multi-modal ablation studies practical, allowing researchers to sweep diverse gripper and sensing configurations without repeated system bring-up. The Physical Mask exposes modality presence as an explicit runtime signal, enabling auto-configuration and graceful degradation under sensor hot-plug events, so policies can continue executing when sensors are physically added or removed. System-centric experiments show that RAPID reduces the setup time for multi-modal configurations by two orders of magnitude compared to traditional workflows and preserves policy execution under runtime sensor hot-unplug events. The hardware designs, drivers, and software stack are open-sourced at https://rapid-kit.github.io/ .