Scalable and General Whole-Body Control for Cross-Humanoid Locomotion
作者: Yufei Xue, YunFeng Lin, Wentao Dong, Yang Tang, Jingbo Wang, Jiangmiao Pang, Ming Zhou, Minghuan Liu, Weinan Zhang
分类: cs.RO
发布日期: 2026-02-05
💡 一句话要点
提出XHugWBC框架,实现通用人形机器人全身控制的跨形态泛化
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱七:动作重定向 (Motion Retargeting) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 人形机器人 全身控制 跨形态泛化 强化学习 形态随机化
📋 核心要点
- 现有基于学习的全身控制器通常需要针对特定机器人进行训练,泛化能力有限。
- XHugWBC框架通过形态随机化、语义对齐的观察和动作空间以及有效的策略架构,学习通用的运动控制策略。
- 实验表明,XHugWBC在多种模拟和真实机器人上实现了零样本迁移,展现了强大的泛化能力。
📝 摘要(中文)
本文研究了跨形态人形机器人控制问题,提出了一种名为XHugWBC的跨形态训练框架,该框架通过一次训练即可实现对各种人形机器人设计的稳健泛化。XHugWBC通过以下方式实现通用人形机器人控制:(1)物理一致的形态随机化;(2)跨不同人形机器人的语义对齐的观察和动作空间;(3)对形态和动力学特性进行建模的有效策略架构。XHugWBC不依赖于任何特定的机器人,而是在训练过程中内化了广泛的形态和动力学特征分布。通过从多样化的随机化形态中学习运动先验,该策略获得了一种强大的结构偏差,支持零样本迁移到以前未见过的机器人。在十二个模拟人形机器人和七个真实机器人上的实验证明了所得到的通用控制器的强大泛化性和鲁棒性。
🔬 方法详解
问题定义:现有基于学习的全身控制方法通常需要针对特定的人形机器人进行训练,难以泛化到具有不同形态和动力学特性的其他机器人上。这限制了这些方法在实际应用中的灵活性和可扩展性。因此,本文旨在解决跨形态人形机器人控制问题,即如何训练一个通用的控制器,使其能够适应各种不同设计的人形机器人。
核心思路:本文的核心思路是通过在训练过程中引入形态随机化,使控制器能够学习到对不同形态和动力学特性的鲁棒性。同时,通过语义对齐的观察和动作空间,确保不同机器人之间可以进行有效的知识迁移。此外,设计合适的策略架构,对形态和动力学特性进行建模,进一步提高控制器的泛化能力。
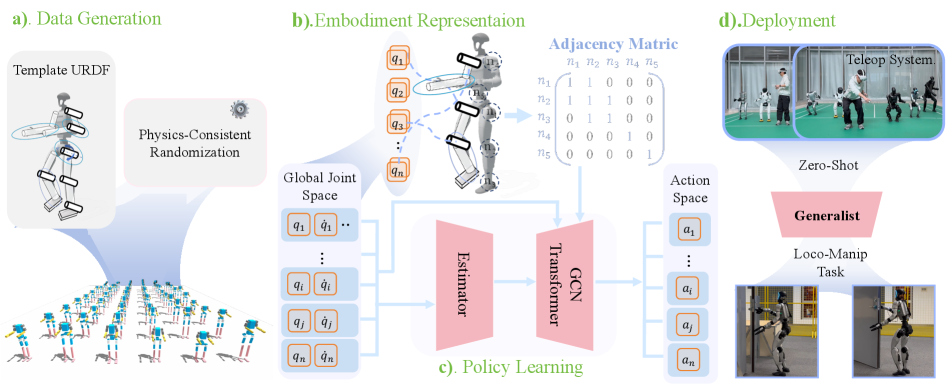
技术框架:XHugWBC框架主要包含三个关键组成部分:物理一致的形态随机化、语义对齐的观察和动作空间以及有效的策略架构。首先,通过随机化机器人的质量、连杆长度、关节限制等参数,生成多样化的训练环境。其次,将不同机器人的观察和动作空间映射到统一的语义空间,例如,使用质心位置、末端执行器位置等语义信息作为观察,使用关节力矩作为动作。最后,设计一个能够对形态和动力学特性进行建模的策略网络,例如,使用图神经网络来表示机器人的拓扑结构。
关键创新:XHugWBC的关键创新在于其跨形态训练框架,该框架能够有效地学习到通用的运动控制策略,并实现零样本迁移到未见过的机器人。与以往的机器人特定训练方法相比,XHugWBC具有更强的泛化能力和鲁棒性。此外,该框架提出的物理一致的形态随机化和语义对齐的观察和动作空间也是重要的技术创新。
关键设计:在形态随机化方面,本文采用了物理一致的随机化方法,确保随机生成的机器人形态在物理上是可行的。在语义对齐方面,本文使用了质心位置、末端执行器位置等语义信息作为观察,使用关节力矩作为动作。在策略网络方面,本文使用了图神经网络来表示机器人的拓扑结构,并使用Transformer网络来学习运动控制策略。损失函数包括模仿学习损失、任务损失和正则化损失。
🖼️ 关键图片

📊 实验亮点
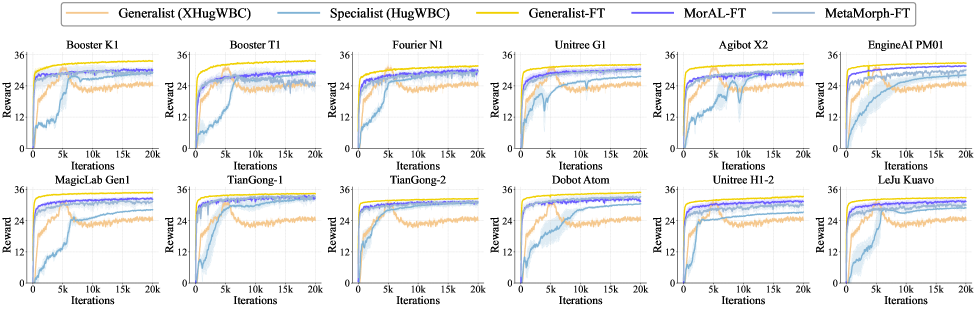
在十二个模拟人形机器人和七个真实机器人上的实验结果表明,XHugWBC能够实现零样本迁移,并且在各种任务中都取得了良好的性能。例如,在行走任务中,XHugWBC能够使未见过的机器人稳定行走,并且能够适应不同的地形和障碍物。与传统的机器人特定训练方法相比,XHugWBC在泛化能力和鲁棒性方面都有显著提升。
🎯 应用场景
该研究成果可广泛应用于人形机器人领域,例如,可以用于开发通用的机器人控制系统,降低机器人开发成本,提高机器人的适应性和灵活性。此外,该研究还可以应用于虚拟现实、游戏等领域,用于生成逼真的人形角色动画。
📄 摘要(原文)
Learning-based whole-body controllers have become a key driver for humanoid robots, yet most existing approaches require robot-specific training. In this paper, we study the problem of cross-embodiment humanoid control and show that a single policy can robustly generalize across a wide range of humanoid robot designs with one-time training. We introduce XHugWBC, a novel cross-embodiment training framework that enables generalist humanoid control through: (1) physics-consistent morphological randomization, (2) semantically aligned observation and action spaces across diverse humanoid robots, and (3) effective policy architectures modeling morphological and dynamical properties. XHugWBC is not tied to any specific robot. Instead, it internalizes a broad distribution of morphological and dynamical characteristics during training. By learning motion priors from diverse randomized embodiments, the policy acquires a strong structural bias that supports zero-shot transfer to previously unseen robots. Experiments on twelve simulated humanoids and seven real-world robots demonstrate the strong generalization and robustness of the resulting universal controller.