HiCrowd: Hierarchical Crowd Flow Alignment for Dense Human Environments
作者: Yufei Zhu, Shih-Min Yang, Martin Magnusson, Allan Wang
分类: cs.RO
发布日期: 2026-02-05
备注: Accepted to the 2026 IEEE International Conference on Robotics and Automation (ICRA)
💡 一句话要点
HiCrowd:面向密集人群环境的分层人群流对齐机器人导航方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 机器人导航 人群导航 强化学习 模型预测控制 人机交互
📋 核心要点
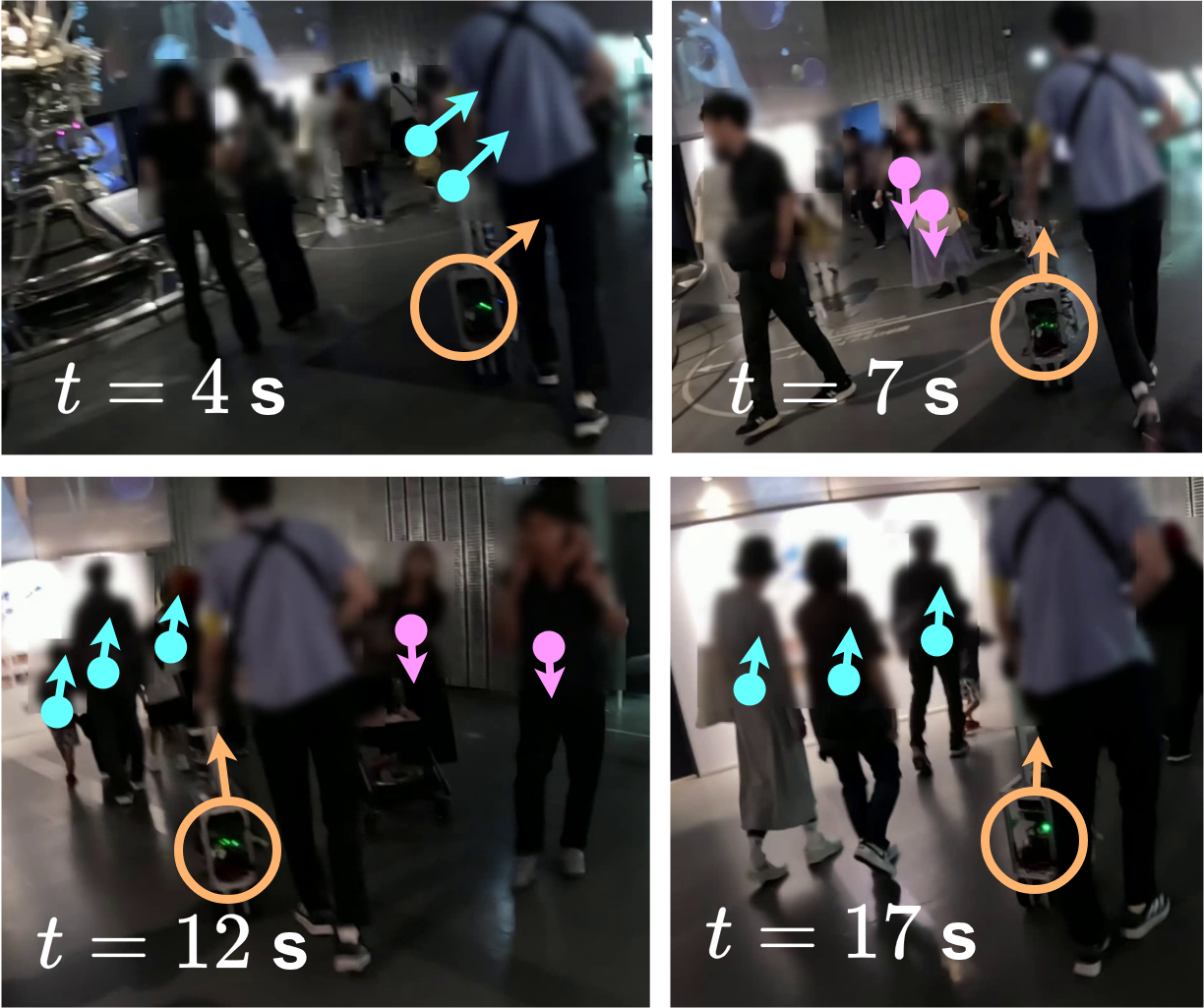
- 现有方法在密集人群中导航时,机器人容易陷入“冻结”状态,难以找到安全路径。
- HiCrowd利用强化学习和模型预测控制,通过人群流对齐引导机器人导航。
- 实验表明,HiCrowd在导航效率和安全性上优于现有方法,并减少了冻结行为。
📝 摘要(中文)
在密集人群中导航对移动机器人来说仍然是一个重大挑战。一个关键问题是机器人的“冻结”问题,即机器人难以找到安全的运动路径并被困在人群中。为了解决这个问题,我们提出了HiCrowd,一个集成了强化学习(RL)和模型预测控制(MPC)的分层框架。HiCrowd利用周围行人的运动作为指导,使机器人能够与兼容的人群流对齐。一个高层RL策略生成一个跟随点,使机器人与合适的人群组对齐,而一个低层MPC通过短视界规划安全地跟踪这个指导。该方法结合了长期的、具有人群意识的决策和安全的短期执行。我们在离线环境(重放记录的人类轨迹)和在线环境(人类轨迹被更新以对模拟中的机器人做出反应)中,针对反应式和基于学习的基线评估了HiCrowd。在真实世界数据集和合成人群数据集上的实验表明,我们的方法在导航效率和安全性方面优于其他方法,同时减少了冻结行为。我们的结果表明,利用人类运动作为指导,而不是仅仅将人类视为动态障碍物,为在人群中安全有效地进行机器人导航提供了一个强大的原则。
🔬 方法详解
问题定义:论文旨在解决密集人群环境中机器人导航的“冻结”问题。现有方法通常将行人视为动态障碍物,缺乏对人群整体运动模式的理解,导致机器人难以找到合适的运动方向,容易陷入停滞状态。
核心思路:论文的核心思路是将人群的运动模式作为导航的指导信息,而不是简单地躲避行人。通过学习人群的流动方向,机器人可以与人群的运动趋势对齐,从而更自然、更高效地穿梭于人群之中。这种方法避免了机器人与人群的对抗,减少了“冻结”的可能性。
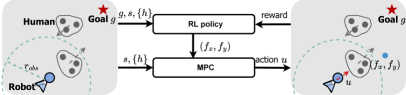
技术框架:HiCrowd采用分层控制框架。高层使用强化学习(RL)策略,根据周围人群的运动模式生成一个“跟随点”,引导机器人与合适的人群组对齐。低层使用模型预测控制(MPC),根据高层指令和环境信息,规划出安全的短期运动轨迹,跟踪“跟随点”。这种分层结构结合了RL的长期决策能力和MPC的短期安全保障。
关键创新:最重要的创新点在于利用人群流作为导航的指导信息。传统方法通常将行人视为独立的动态障碍物,而HiCrowd则关注人群的整体运动模式,通过与人群流对齐来实现更高效、更自然的导航。这种方法改变了机器人与人群的交互方式,从对抗转向合作。
关键设计:高层RL策略使用深度神经网络进行训练,输入包括机器人的状态、周围人群的运动信息等,输出为“跟随点”的位置。低层MPC使用优化的方法,根据机器人动力学模型和环境约束,规划出安全的运动轨迹。论文中没有详细说明具体的网络结构和损失函数,这部分信息可能在补充材料或相关论文中。
🖼️ 关键图片

📊 实验亮点
在真实世界数据集和合成人群数据集上的实验表明,HiCrowd在导航效率和安全性方面优于反应式和基于学习的基线方法。具体而言,HiCrowd能够显著减少机器人的“冻结”行为,并提高导航的成功率和平均速度。这些结果验证了利用人群运动作为指导进行机器人导航的有效性。
🎯 应用场景
HiCrowd技术可应用于各种需要机器人与人群交互的场景,例如:商场导览机器人、医院配送机器人、机场行李搬运机器人等。通过与人群流对齐,机器人可以更安全、更高效地完成任务,提升用户体验。该研究也为未来人机协作机器人导航提供了新的思路。
📄 摘要(原文)
Navigating through dense human crowds remains a significant challenge for mobile robots. A key issue is the freezing robot problem, where the robot struggles to find safe motions and becomes stuck within the crowd. To address this, we propose HiCrowd, a hierarchical framework that integrates reinforcement learning (RL) with model predictive control (MPC). HiCrowd leverages surrounding pedestrian motion as guidance, enabling the robot to align with compatible crowd flows. A high-level RL policy generates a follow point to align the robot with a suitable pedestrian group, while a low-level MPC safely tracks this guidance with short horizon planning. The method combines long-term crowd aware decision making with safe short-term execution. We evaluate HiCrowd against reactive and learning-based baselines in offline setting (replaying recorded human trajectories) and online setting (human trajectories are updated to react to the robot in simulation). Experiments on a real-world dataset and a synthetic crowd dataset show that our method outperforms in navigation efficiency and safety, while reducing freezing behaviors. Our results suggest that leveraging human motion as guidance, rather than treating humans solely as dynamic obstacles, provides a powerful principle for safe and efficient robot navigation in crowds.