Learning Soccer Skills for Humanoid Robots: A Progressive Perception-Action Framework
作者: Jipeng Kong, Xinzhe Liu, Yuhang Lin, Jinrui Han, Sören Schwertfeger, Chenjia Bai, Xuelong Li
分类: cs.RO
发布日期: 2026-02-05
备注: 13 pages, 9 figures, conference
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出PAiD框架,解决人型机器人足球技能学习中感知-动作集成难题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 人型机器人 足球技能 感知-动作集成 Sim-to-Real 具身智能
📋 核心要点
- 现有方法在模块化流程中存在模块间不稳定问题,端到端框架则面临训练目标冲突的挑战。
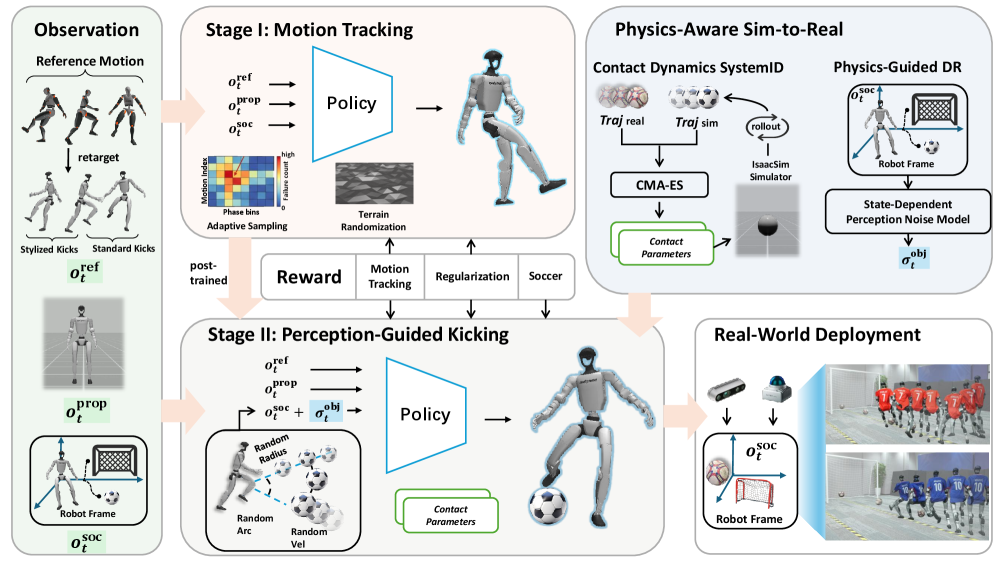
- PAiD框架采用渐进式架构,分阶段学习运动技能、感知-动作集成和Sim-to-Real迁移,避免奖励冲突。
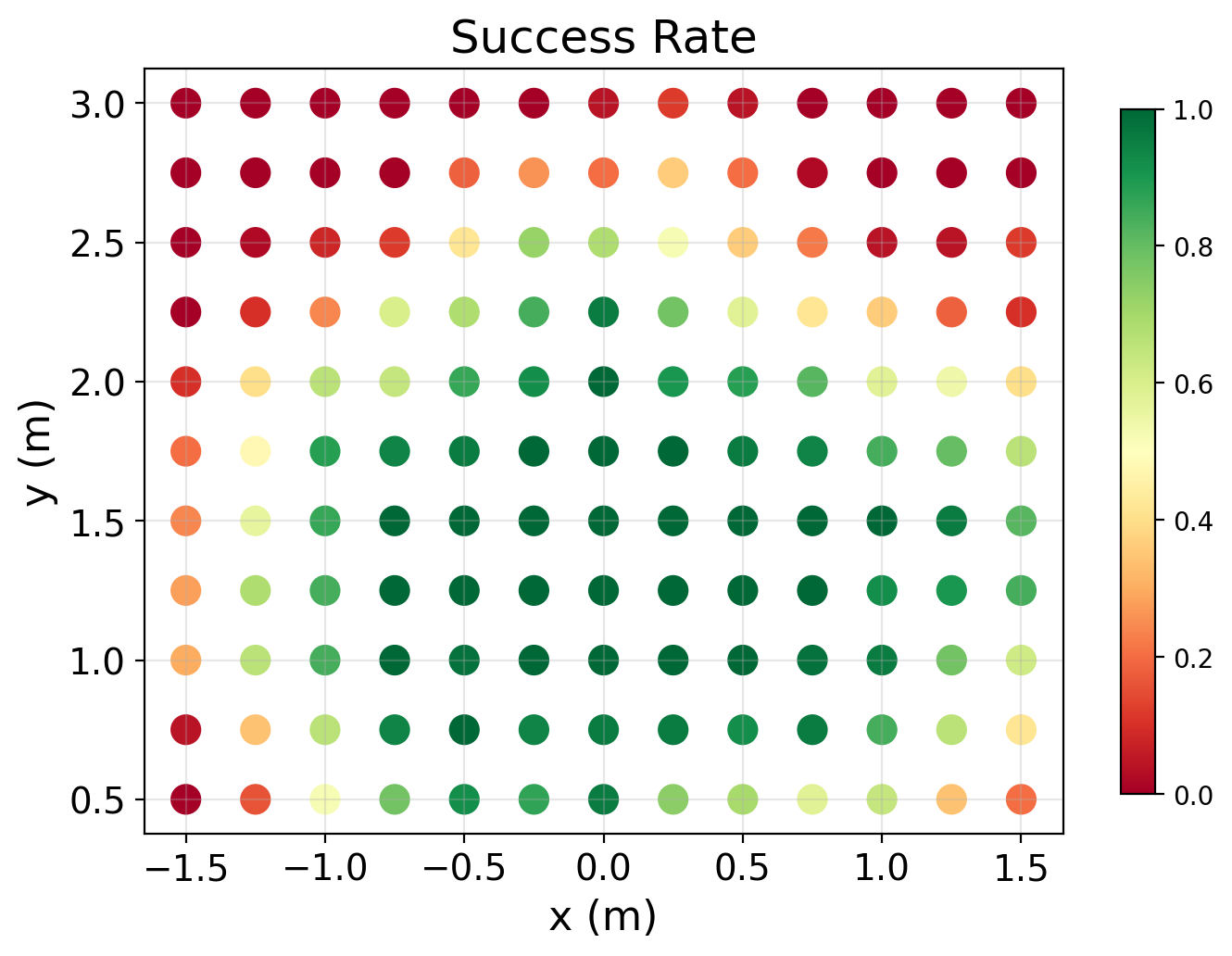
- 实验表明,PAiD框架在Unitree G1上实现了高保真、鲁棒的人类式踢球,并具备良好的泛化能力。
📝 摘要(中文)
本文针对人型机器人足球技能学习中感知与动作紧密集成的问题,提出了一种名为感知-动作集成决策(PAiD)的渐进式架构。该架构将足球技能学习分解为三个阶段:通过人体运动跟踪获取运动技能;进行轻量级的感知-动作集成以实现位置泛化;以及进行物理感知的Sim-to-Real迁移。这种分阶段分解建立了稳定的基础技能,避免了感知集成过程中的奖励冲突,并最大限度地减少了Sim-to-Real的差距。在Unitree G1上的实验表明,该方法能够实现高保真的人类式踢球,并在各种条件下(包括静态或滚动的球、不同的位置和干扰)保持稳健的性能,同时在室内和室外场景中保持一致的执行效果。这种分而治之的策略提升了人型机器人足球的鲁棒性,并为复杂的具身技能学习提供了一个可扩展的框架。
🔬 方法详解
问题定义:人型机器人足球技能学习需要紧密集成感知和动作,现有方法要么采用模块化pipeline,但模块间不稳定;要么采用端到端框架,但训练目标容易冲突,导致学习效果不佳。因此,如何稳定、高效地学习人型机器人的足球技能是一个挑战。
核心思路:论文的核心思路是将复杂的足球技能学习分解为多个阶段,每个阶段专注于解决特定的问题,从而避免了整体训练的复杂性和冲突。通过逐步集成感知和动作,并利用Sim-to-Real迁移,最终实现机器人足球技能的鲁棒性和泛化能力。
技术框架:PAiD框架包含三个主要阶段:1) 运动技能获取:通过人体运动跟踪学习基础的踢球动作;2) 轻量级感知-动作集成:将感知信息(如球的位置)与动作进行集成,使机器人能够根据球的位置调整踢球动作,实现位置泛化;3) 物理感知Sim-to-Real迁移:利用物理引擎进行仿真训练,并将训练结果迁移到真实机器人上,提高机器人在真实环境中的适应性。
关键创新:该方法最重要的创新点在于其渐进式的学习框架,通过分阶段学习,避免了复杂的奖励函数设计和训练过程中的冲突。这种分而治之的策略使得机器人能够更稳定、更高效地学习复杂的具身技能。
关键设计:论文中没有详细描述具体的参数设置、损失函数和网络结构等技术细节,这些信息可能在补充材料或后续工作中给出。但整体框架的设计思路是,每个阶段都采用合适的学习方法和优化目标,例如,运动技能获取阶段可能采用模仿学习,感知-动作集成阶段可能采用强化学习,Sim-to-Real迁移阶段可能采用领域自适应方法。
🖼️ 关键图片
📊 实验亮点
实验结果表明,PAiD框架在Unitree G1机器人上实现了高保真的人类式踢球动作,并且在各种复杂条件下(如不同位置、滚动的球、外部干扰等)都表现出良好的鲁棒性。此外,该方法在室内和室外场景中都保持了一致的执行效果,验证了其Sim-to-Real迁移的有效性。项目主页提供了更多实验视频和数据。
🎯 应用场景
该研究成果可应用于人型机器人足球比赛、机器人辅助训练、以及其他需要精细运动控制和感知-动作集成的机器人应用场景。通过PAiD框架,可以降低复杂具身技能的学习难度,提高机器人的自主性和适应性,从而扩展人型机器人在体育、娱乐、服务等领域的应用。
📄 摘要(原文)
Soccer presents a significant challenge for humanoid robots, demanding tightly integrated perception-action capabilities for tasks like perception-guided kicking and whole-body balance control. Existing approaches suffer from inter-module instability in modular pipelines or conflicting training objectives in end-to-end frameworks. We propose Perception-Action integrated Decision-making (PAiD), a progressive architecture that decomposes soccer skill acquisition into three stages: motion-skill acquisition via human motion tracking, lightweight perception-action integration for positional generalization, and physics-aware sim-to-real transfer. This staged decomposition establishes stable foundational skills, avoids reward conflicts during perception integration, and minimizes sim-to-real gaps. Experiments on the Unitree G1 demonstrate high-fidelity human-like kicking with robust performance under diverse conditions-including static or rolling balls, various positions, and disturbances-while maintaining consistent execution across indoor and outdoor scenarios. Our divide-and-conquer strategy advances robust humanoid soccer capabilities and offers a scalable framework for complex embodied skill acquisition. The project page is available at https://soccer-humanoid.github.io/.