Shaping Expressiveness in Robotics: The Role of Design Tools in Crafting Embodied Robot Movements
作者: Elisabetta Zibetti, Alexandra Mercader, Hélène Duval, Florent Levillain, Audrey Rochette, David St-Onge
分类: cs.RO
发布日期: 2026-02-04
💡 一句话要点
提出一种基于设计工具的机器人表达性运动生成方法,提升人机交互体验
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人运动设计 表达性运动 人机交互 具身认知 舞蹈分析 设计工具 机械臂控制
📋 核心要点
- 现有机器人运动设计缺乏表达性,难以有效进行人机交互,需要更具表现力的运动设计方法。
- 论文提出一种以运动为中心的设计教学法,结合舞蹈分析框架,辅助工程师设计表达性机械臂运动。
- 通过互动研讨会和定制工具,参与者探索了多种运动表达方式,验证了该方法在提升机器人表达性方面的有效性。
📝 摘要(中文)
随着机器人越来越多地进入人类共享空间,它们的运动必须超越基本功能,融入表达性特征,以增强互动和沟通。本文介绍了一种以运动为中心的设计教学法,旨在支持工程师创造富有表现力的机械臂运动。通过一个基于跨学科方法的实践互动研讨会,参与者探索了各种创造性可能性,从而对表达性运动设计产生了宝贵的见解。所提出的迭代方法整合了舞蹈分析框架,使设计者能够通过动态和具身维度来检查运动。定制的手动遥控器有助于机械臂的交互式实时操作,而专用动画软件支持可视化、详细的运动排序和精确的参数控制。对这种互动设计过程的定性分析表明,所提出的“工具箱”有效地弥合了人类意图和机器人表达性之间的差距,从而产生了更直观和更具吸引力的表达性机械臂运动。
🔬 方法详解
问题定义:当前机器人运动设计主要关注功能性,缺乏足够的表达性,导致人机交互体验不佳。工程师在设计机器人运动时,难以将人类的情感和意图融入其中,使得机器人显得生硬和缺乏人情味。现有方法缺乏有效的工具和框架,来指导工程师创造具有表达性的机器人运动。
核心思路:论文的核心思路是借鉴舞蹈的分析框架,将运动分解为动态和具身维度,并提供一套交互式设计工具,帮助工程师探索和创造富有表现力的机器人运动。通过将人类的意图和情感融入到机器人运动中,从而提升人机交互的质量。
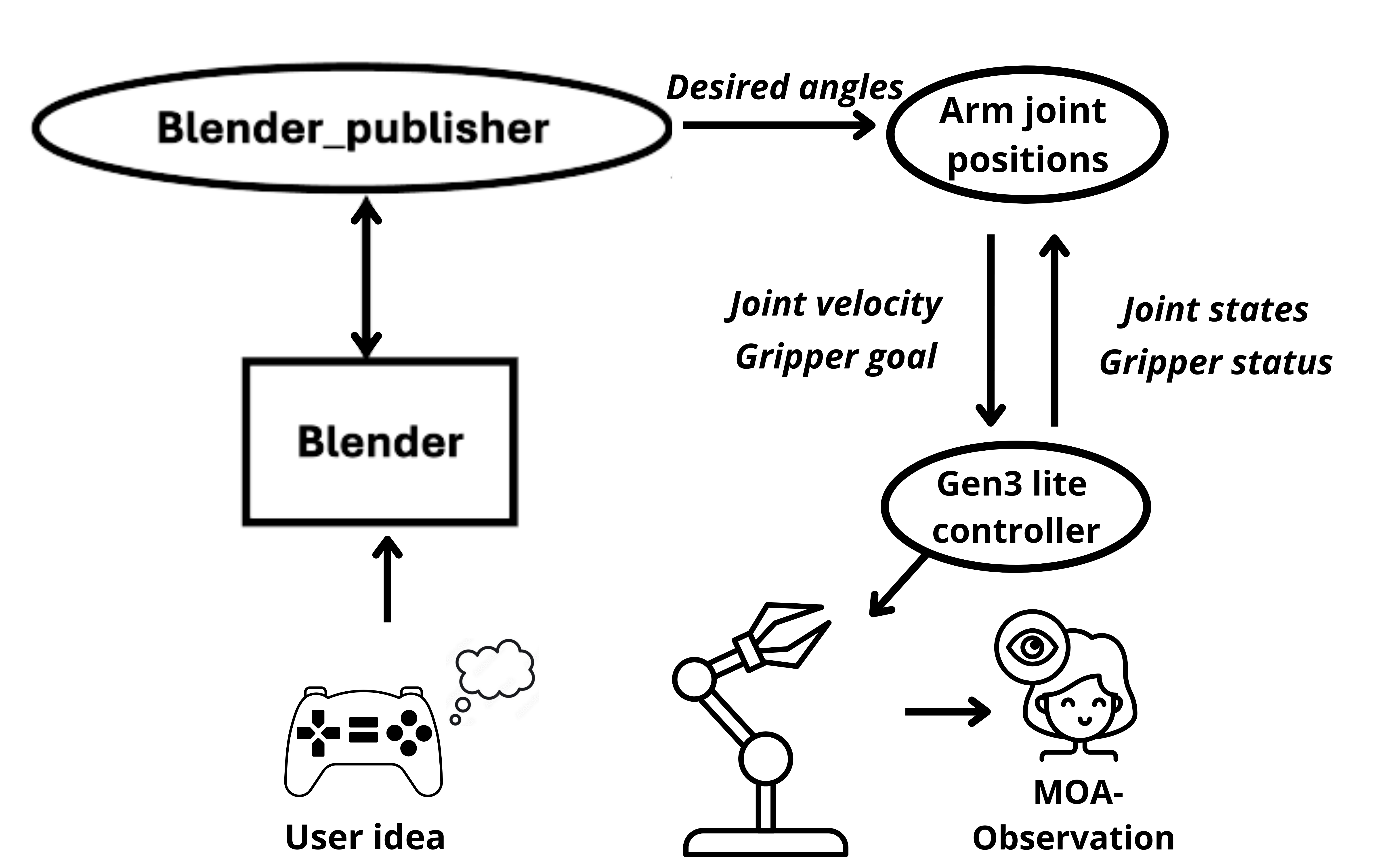
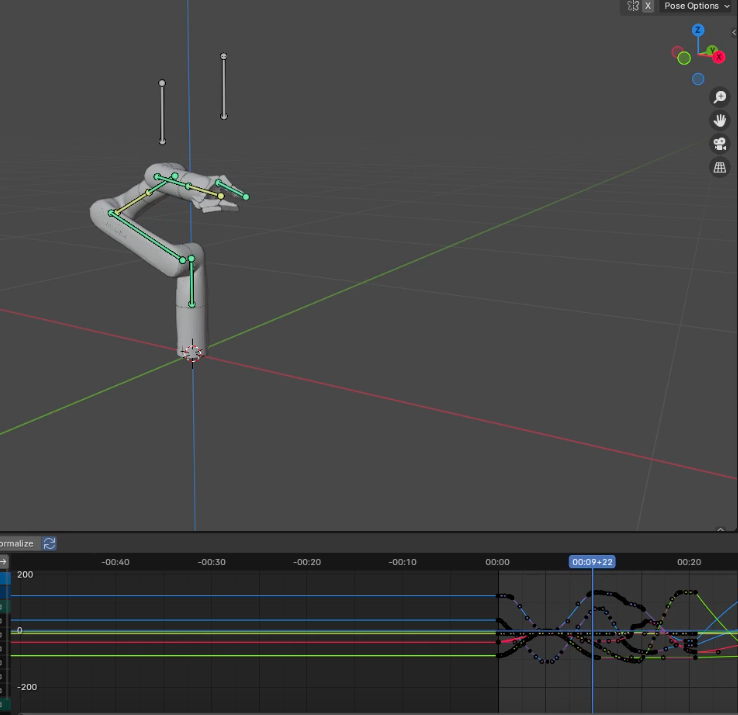
技术框架:该方法包含以下几个主要模块:1) 跨学科的研讨会,参与者探索运动表达的可能性;2) 基于舞蹈分析的运动框架,用于分析和理解运动的表达性;3) 定制的手动遥控器,用于实时控制机械臂;4) 动画软件,用于可视化、运动排序和参数控制。整个流程是一个迭代的设计过程,工程师通过不断地尝试和反馈,逐步优化机器人运动的表达性。
关键创新:该方法的关键创新在于将舞蹈的分析框架引入到机器人运动设计中,并提供了一套交互式的设计工具,使得工程师能够更加直观和有效地创造富有表达力的机器人运动。与传统方法相比,该方法更加注重运动的表达性,而不是仅仅关注功能性。
关键设计:关键设计包括:1) 手动遥控器的设计,允许工程师实时控制机械臂,并直接观察运动的效果;2) 动画软件的设计,提供了可视化和参数控制的功能,方便工程师进行运动排序和参数调整;3) 舞蹈分析框架的应用,帮助工程师理解运动的表达性,并将其融入到机器人运动设计中。
🖼️ 关键图片

📊 实验亮点
通过定性分析,论文验证了所提出的“工具箱”能够有效弥合人类意图和机器人表达性之间的差距,从而产生更直观和更具吸引力的表达性机械臂运动。参与者在研讨会中创造了多种富有表现力的机器人运动,证明了该方法在提升机器人表达性方面的潜力。虽然论文没有提供具体的性能数据,但其定性分析结果表明,该方法具有显著的实际价值。
🎯 应用场景
该研究成果可应用于服务机器人、教育机器人、娱乐机器人等领域,提升机器人与人类的互动体验。例如,在医疗康复领域,可以设计具有情感表达的机器人辅助患者进行康复训练;在教育领域,可以设计具有生动肢体语言的机器人教师,提高学生的学习兴趣。该研究为未来机器人设计提供了新的思路和方法,有助于构建更加人性化和智能化的机器人。
📄 摘要(原文)
As robots increasingly become part of shared human spaces, their movements must transcend basic functionality by incorporating expressive qualities to enhance engagement and communication. This paper introduces a movement-centered design pedagogy designed to support engineers in creating expressive robotic arm movements. Through a hands-on interactive workshop informed by interdisciplinary methodologies, participants explored various creative possibilities, generating valuable insights into expressive motion design. The iterative approach proposed integrates analytical frameworks from dance, enabling designers to examine motion through dynamic and embodied dimensions. A custom manual remote controller facilitates interactive, real-time manipulation of the robotic arm, while dedicated animation software supports visualization, detailed motion sequencing, and precise parameter control. Qualitative analysis of this interactive design process reveals that the proposed "toolbox" effectively bridges the gap between human intent and robotic expressiveness resulting in more intuitive and engaging expressive robotic arm movements.