When Should Agents Coordinate in Differentiable Sequential Decision Problems?
作者: Caleb Probine, Su Ann Low, David Fridovich-Keil, Ufuk Topcu
分类: cs.MA, cs.GT, cs.RO, math.OC
发布日期: 2026-02-03
备注: 15 content pages, 2 pages for references, 4 figures
💡 一句话要点
提出基于二阶信息的协调决策方法,解决可微序列决策问题中的多智能体通信时机选择问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多智能体系统 协调决策 可微规划 二阶优化 通信优化
📋 核心要点
- 多智能体系统协调是提升团队表现的关键,但通信成本限制了频繁协调。
- 论文核心思想是利用智能体目标函数的二阶信息来判断何时进行协调,从而降低通信成本。
- 该方法通过分析二阶属性,确定智能体团队应该在哪些时间点进行协调,优化整体性能。
📝 摘要(中文)
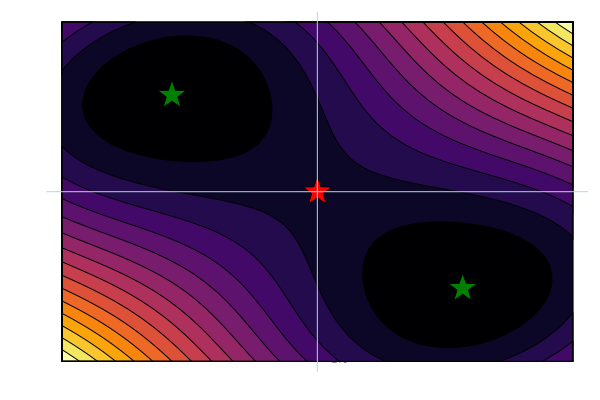
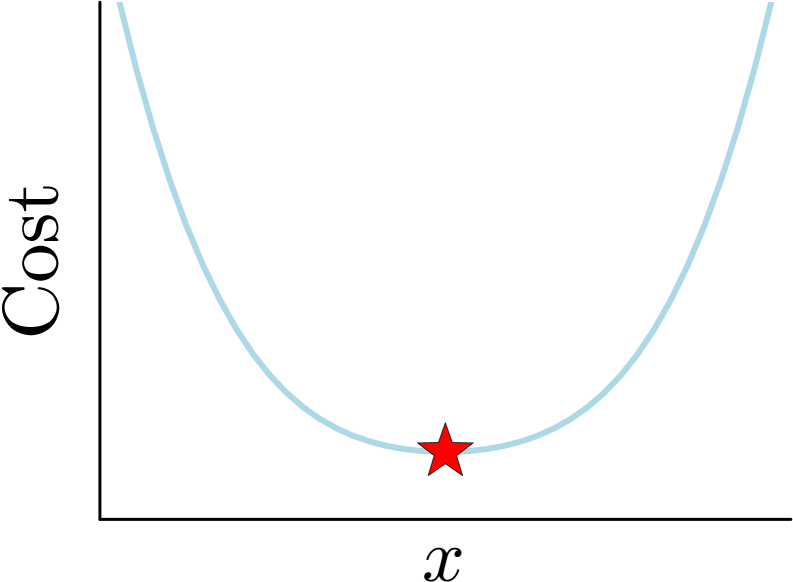
多机器人团队需要协同工作才能高效运作。当团队以非协同方式运作,智能体仅选择个体最优动作时,团队的整体表现会受到影响。然而,在许多领域,协同需要昂贵的通信成本。本文探讨了在广泛的可微运动规划问题中协同的价值。特别地,我们将协同行为建模为一个谱系:在一端,智能体联合优化一个共同的团队目标;在另一端,智能体根据其个体决策变量做出单方面最优的决策,即在纳什均衡状态下运作。我们证明了在可微运动规划问题中对协同进行推理可以简化为对智能体目标函数的二阶属性进行推理,并提供了使用这种二阶推理来确定智能体团队应该在哪些时间点进行协同的算法。
🔬 方法详解
问题定义:论文旨在解决多智能体在可微序列决策问题中,何时进行协调通信以达到最优团队性能的问题。现有方法要么假设智能体始终协调,导致通信成本过高;要么完全不协调,导致团队性能下降。痛点在于如何在通信成本和团队性能之间取得平衡。
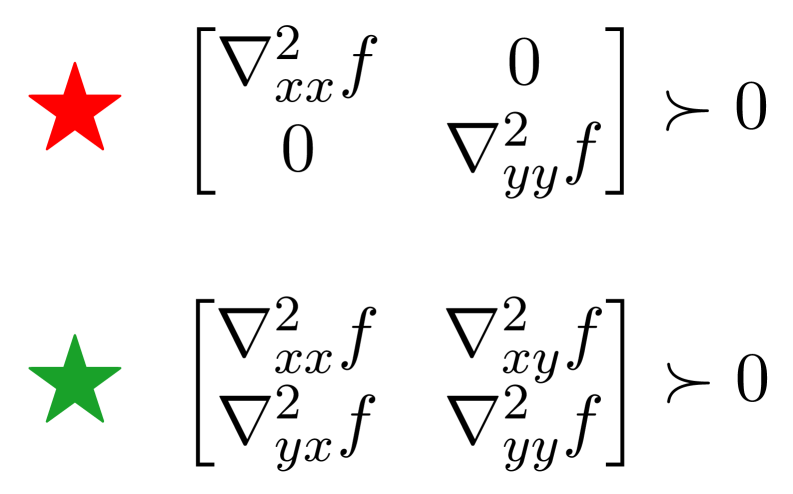
核心思路:论文的核心思路是利用智能体目标函数的二阶信息(例如Hessian矩阵)来评估协调的必要性。如果二阶信息表明智能体之间的目标高度相关,则协调可能带来显著的性能提升;反之,如果目标相对独立,则可以避免不必要的通信。这样,协调决策就转化为对目标函数二阶属性的分析。
技术框架:整体框架包含以下几个主要阶段:1) 定义多智能体的可微序列决策问题,包括智能体的个体目标函数和团队目标函数;2) 推导智能体目标函数的二阶导数(Hessian矩阵);3) 基于Hessian矩阵分析智能体目标之间的相关性;4) 设计算法,根据相关性指标动态地决定何时进行协调通信。
关键创新:最重要的技术创新点在于将协调决策问题转化为对目标函数二阶属性的分析。与现有方法相比,该方法能够更精确地评估协调的价值,从而避免不必要的通信,降低通信成本。本质区别在于,现有方法通常基于启发式规则或经验来决定协调时机,而该方法则基于对问题本身的数学分析。
关键设计:关键设计包括:1) 如何定义智能体之间的相关性指标,例如基于Hessian矩阵的特征值或奇异值;2) 如何设计算法,根据相关性指标动态地调整协调频率;3) 如何将该方法应用于不同的可微运动规划问题,例如路径规划、轨迹优化等。论文可能还涉及一些参数设置,例如相关性阈值、协调频率上限等,这些参数需要根据具体问题进行调整。
🖼️ 关键图片
📊 实验亮点
论文通过实验验证了所提出方法的有效性。具体而言,在可微运动规划问题中,该方法能够显著降低智能体之间的通信次数,同时保持甚至提升团队的整体性能。与始终协调或完全不协调的基线方法相比,该方法在通信成本和团队性能之间取得了更好的平衡。
🎯 应用场景
该研究成果可应用于多机器人协同作业、自动驾驶车队管理、智能交通控制等领域。通过优化智能体之间的通信时机,可以降低通信成本,提高系统效率,并提升团队整体性能。未来,该方法有望推广到更广泛的多智能体系统,例如分布式计算、社交网络等。
📄 摘要(原文)
Multi-robot teams must coordinate to operate effectively. When a team operates in an uncoordinated manner, and agents choose actions that are only individually optimal, the team's outcome can suffer. However, in many domains, coordination requires costly communication. We explore the value of coordination in a broad class of differentiable motion-planning problems. In particular, we model coordinated behavior as a spectrum: at one extreme, agents jointly optimize a common team objective, and at the other, agents make unilaterally optimal decisions given their individual decision variables, i.e., they operate at Nash equilibria. We then demonstrate that reasoning about coordination in differentiable motion-planning problems reduces to reasoning about the second-order properties of agents' objectives, and we provide algorithms that use this second-order reasoning to determine at which times a team of agents should coordinate.