CMR: Contractive Mapping Embeddings for Robust Humanoid Locomotion on Unstructured Terrains
作者: Qixin Zeng, Hongyin Zhang, Shangke Lyu, Junxi Jin, Donglin Wang, Chao Huang
分类: cs.RO, cs.AI
发布日期: 2026-02-03
💡 一句话要点
提出CMR框架,通过Contractive Mapping提升人形机器人非结构化地形鲁棒运动能力
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 人形机器人 鲁棒运动 非结构化地形 对比学习 Lipschitz正则化
📋 核心要点
- 人形机器人在非结构化地形运动时,易受传感器噪声和模型偏差影响,导致策略不稳定,鲁棒性差。
- 提出Contractive Mapping for Robustness (CMR)框架,通过对比学习和Lipschitz正则化,将观测映射到对扰动不敏感的潜在空间。
- 实验表明,CMR在噪声环境下显著优于其他运动算法,验证了其在提升人形机器人运动鲁棒性方面的有效性。
📝 摘要(中文)
人形机器人在非结构化地形上的鲁棒运动是一个长期存在的挑战,尤其是在传感不可靠和模型失配明显的情况下。虽然高度图等感知信息可以增强地形感知,但传感器噪声和模拟到真实的差距会使策略不稳定。本文提供了理论分析,在潜在动力学是收缩的情况下,约束了观测噪声下的回报差距。此外,我们提出了Contractive Mapping for Robustness (CMR)框架,将高维、易受扰动的观测映射到潜在空间,从而随时间衰减局部扰动。具体来说,该方法将对比表示学习与Lipschitz正则化相结合,以保持任务相关的几何结构,同时显式地控制灵敏度。值得注意的是,该公式可以作为辅助损失项整合到现代深度强化学习流程中,而无需额外的技术努力。大量的人形机器人实验表明,在噪声增加的情况下,CMR优于其他运动算法。
🔬 方法详解
问题定义:人形机器人在非结构化地形上的运动控制面临着严重的挑战,主要来源于传感器噪声和模型失配。现有的方法虽然利用了感知信息(如高度图)来增强地形感知,但这些感知信息本身也容易受到噪声污染,导致控制策略不稳定,难以实现鲁棒的运动控制。因此,如何有效地处理噪声,提高人形机器人在复杂地形下的运动鲁棒性是本文要解决的核心问题。
核心思路:本文的核心思路是将高维、易受扰动的观测数据映射到一个低维的潜在空间,并在该潜在空间中学习具有收缩性的动力学模型。通过这种方式,可以有效地衰减观测噪声带来的扰动,从而提高控制策略的鲁棒性。此外,通过对比学习和Lipschitz正则化,可以保证潜在空间中的表示既能保留任务相关的几何信息,又能降低对噪声的敏感度。
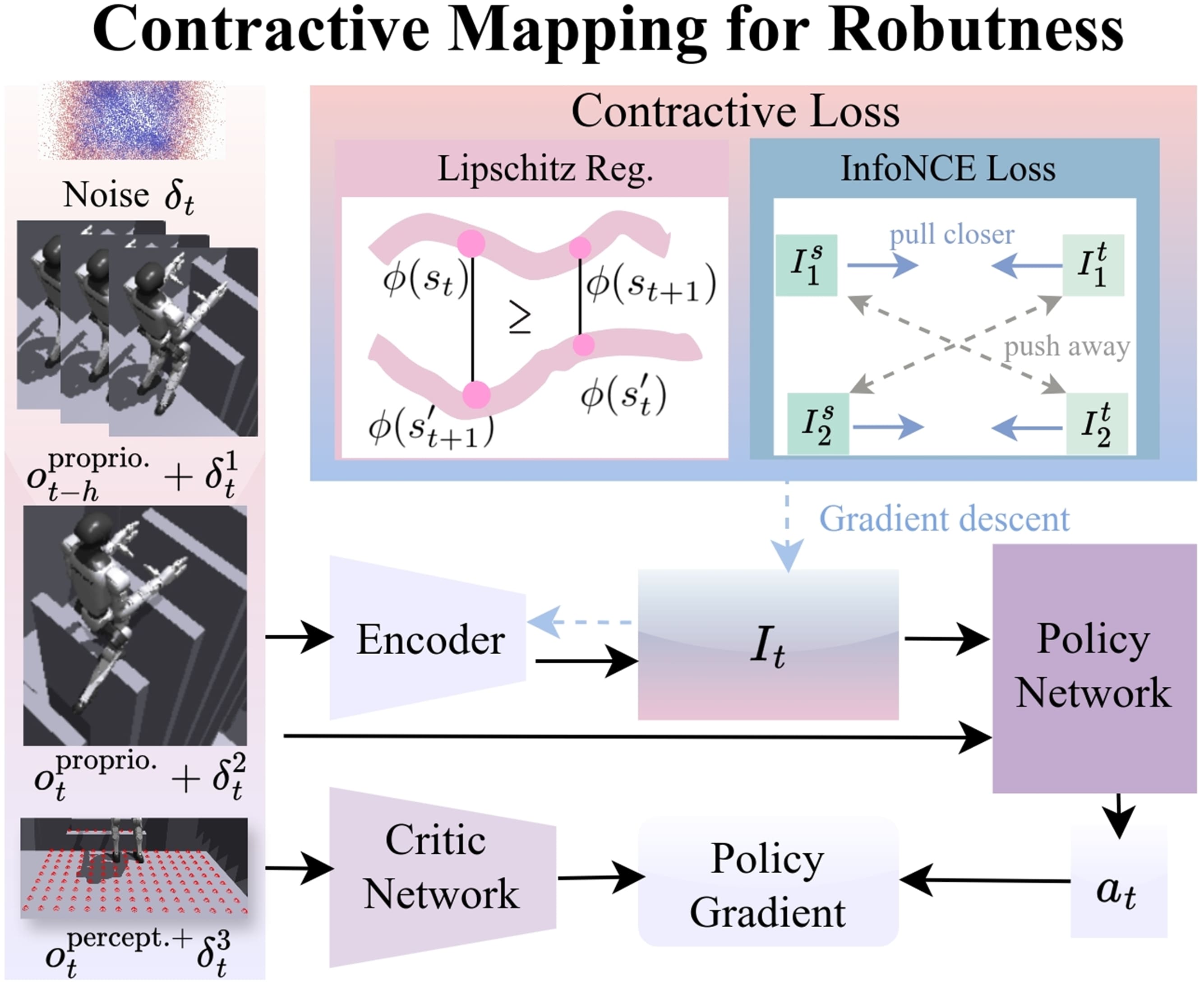
技术框架:CMR框架主要包含以下几个关键模块:1) 观测编码器:将高维的观测数据(如传感器数据、高度图等)编码到低维的潜在空间;2) 对比学习模块:通过对比学习,使得潜在空间中的表示能够区分不同的状态,并保留任务相关的几何信息;3) Lipschitz正则化模块:通过Lipschitz正则化,限制编码器的灵敏度,使得潜在空间中的表示对输入噪声不敏感;4) 强化学习策略:在潜在空间中学习控制策略,实现人形机器人的运动控制。整体流程是,首先利用观测编码器将观测数据映射到潜在空间,然后利用强化学习策略在潜在空间中进行运动控制。
关键创新:本文最重要的技术创新在于将对比表示学习与Lipschitz正则化相结合,构建了一个具有收缩性的潜在空间。这种方法能够有效地衰减观测噪声带来的扰动,从而提高控制策略的鲁棒性。与现有方法相比,CMR框架不需要对噪声进行显式的建模或过滤,而是通过学习一个对噪声不敏感的潜在空间来实现鲁棒控制。
关键设计:在具体实现上,本文采用了以下关键设计:1) 观测编码器采用深度神经网络结构,能够有效地提取高维观测数据中的特征;2) 对比学习损失函数采用InfoNCE损失,能够有效地学习到区分不同状态的表示;3) Lipschitz正则化通过谱归一化来实现,能够有效地限制编码器的灵敏度;4) 强化学习策略采用PPO算法,能够有效地学习到人形机器人的运动控制策略。
🖼️ 关键图片
📊 实验亮点
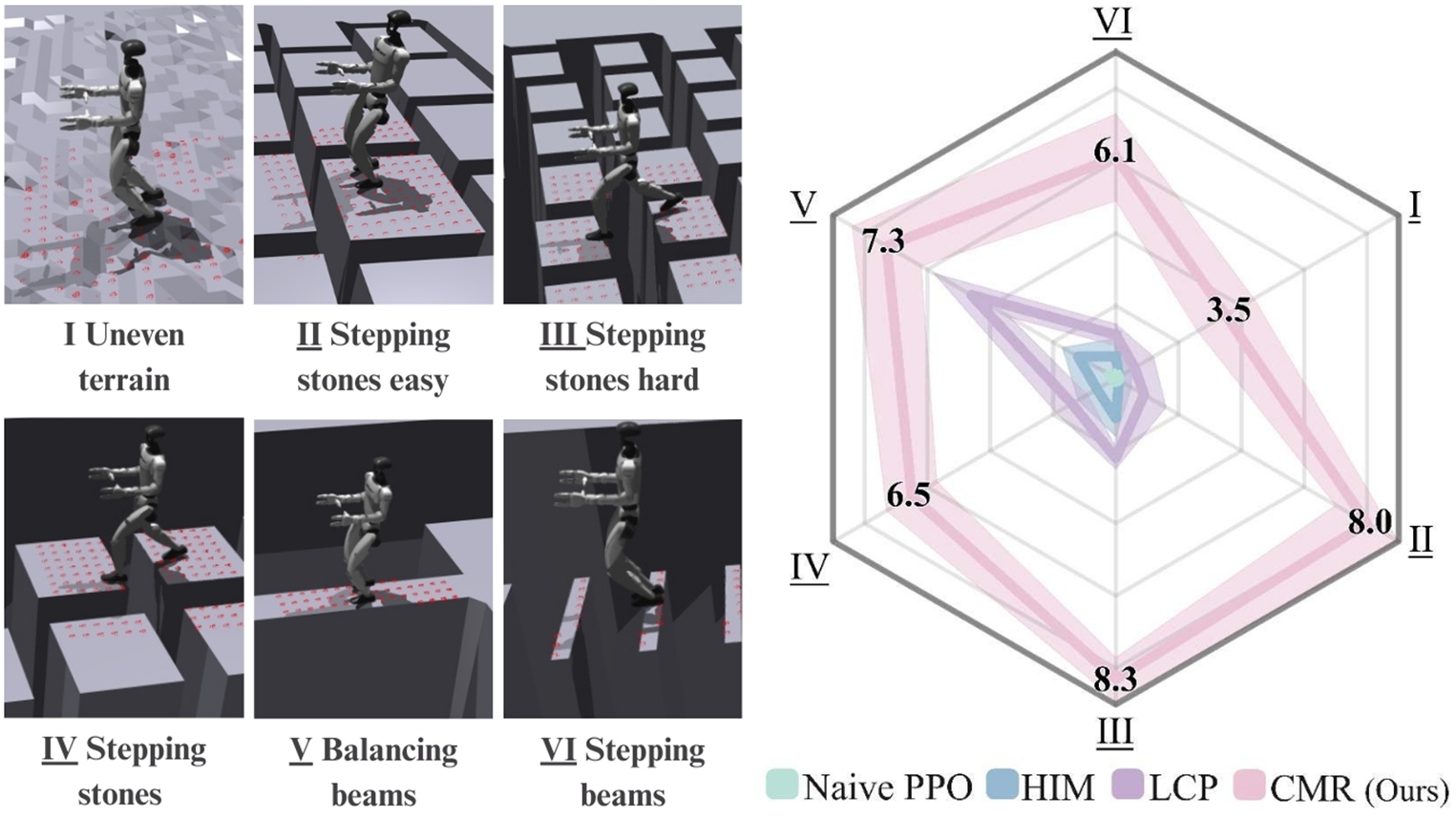
实验结果表明,在噪声环境下,CMR框架显著优于其他运动算法。例如,在高度噪声环境下,CMR框架能够实现稳定的人形机器人运动,而其他算法则容易失效。此外,CMR框架还能够提高人形机器人在不同地形下的适应能力,例如在斜坡、台阶等地形下,CMR框架能够实现稳定的人形机器人运动。
🎯 应用场景
该研究成果可广泛应用于人形机器人在复杂环境下的运动控制,例如搜救、勘探、物流等领域。通过提高人形机器人在非结构化地形下的运动鲁棒性,可以使其更好地适应各种复杂环境,完成各种任务。此外,该方法还可以应用于其他机器人领域,例如四足机器人、无人车等,提高其在复杂环境下的适应能力。
📄 摘要(原文)
Robust disturbance rejection remains a longstanding challenge in humanoid locomotion, particularly on unstructured terrains where sensing is unreliable and model mismatch is pronounced. While perception information, such as height map, enhances terrain awareness, sensor noise and sim-to-real gaps can destabilize policies in practice. In this work, we provide theoretical analysis that bounds the return gap under observation noise, when the induced latent dynamics are contractive. Furthermore, we present Contractive Mapping for Robustness (CMR) framework that maps high-dimensional, disturbance-prone observations into a latent space, where local perturbations are attenuated over time. Specifically, this approach couples contrastive representation learning with Lipschitz regularization to preserve task-relevant geometry while explicitly controlling sensitivity. Notably, the formulation can be incorporated into modern deep reinforcement learning pipelines as an auxiliary loss term with minimal additional technical effort required. Further, our extensive humanoid experiments show that CMR potently outperforms other locomotion algorithms under increased noise.