Model-based Optimal Control for Rigid-Soft Underactuated Systems
作者: Daniele Caradonna, Nikhil Nair, Anup Teejo Mathew, Daniel Feliu Talegón, Imran Afgan, Egidio Falotico, Cosimo Della Santina, Federico Renda
分类: cs.RO
发布日期: 2026-02-03
💡 一句话要点
针对刚柔混合欠驱动系统,提出基于模型的优化控制策略,实现动态摆动任务。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 优化控制 模型预测控制 几何变分应变模型 欠驱动系统
📋 核心要点
- 现有软体机器人控制方法难以兼顾动态性能和模型复杂度,尤其是在刚柔混合系统中,动态任务控制面临挑战。
- 论文提出基于模型的优化控制策略,利用几何变分应变模型提供的解析导数,提升计算效率和控制精度。
- 通过在软体小车-杆等基准系统上的仿真实验,验证了所提方法在动态摆动任务中的有效性和计算性能。
📝 摘要(中文)
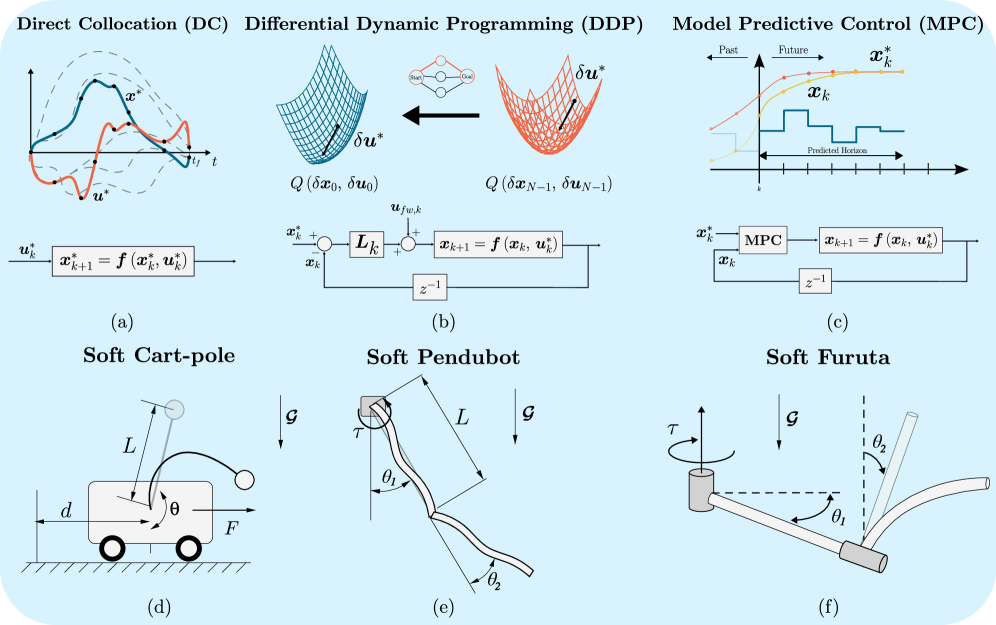
连续软体机器人天生欠驱动且受限于固有的输入约束,这使得动态控制极具挑战性,尤其是在刚柔混合机器人中。现有方法大多关注准静态行为,而诸如摆动等动态任务需要精确利用连续体动力学。这导致了对简单低阶模板系统的研究,但这些系统通常无法捕捉真实连续体变形的复杂性。基于模型的优化控制提供了一种系统性的解决方案;然而,由于高维模型的计算成本和数值微分的不准确性,其在刚柔机器人中的应用受到限制。本文基于几何变分应变模型的最新进展,该模型支持解析导数,研究了三种用于欠驱动软体系统的优化控制策略——直接配置法、微分动态规划和非线性模型预测控制——以执行动态摆动任务。为了解决刚性连续体动力学和约束驱动问题,采用隐式积分方案和热启动策略来提高数值鲁棒性和计算效率。这些方法在软体小车-杆、软体Pendubot和软体Furuta摆等三个刚柔混合和高阶软体基准系统上进行了仿真评估,突出了它们的性能和计算权衡。
🔬 方法详解
问题定义:论文旨在解决刚柔混合欠驱动软体机器人动态控制中的难题,现有方法通常依赖于简化模型或数值微分,无法在计算效率和控制精度之间取得平衡,难以实现复杂的动态任务,例如摆动。
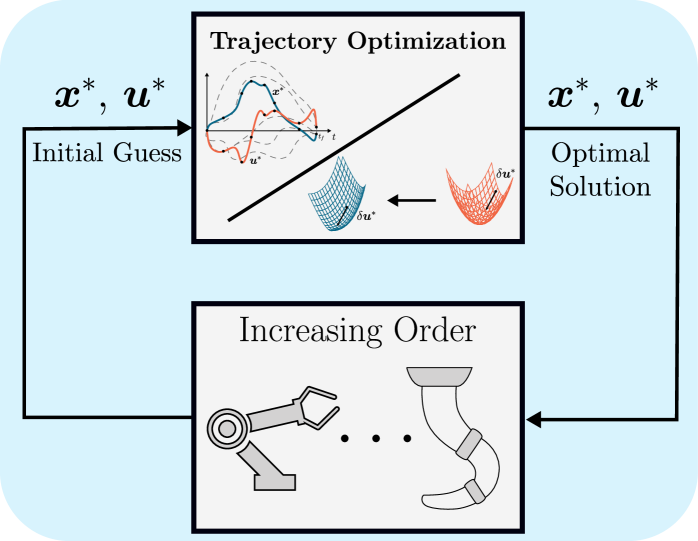
核心思路:论文的核心思路是利用基于几何变分应变模型的优化控制方法,该模型能够提供解析导数,从而避免了数值微分带来的计算负担和不准确性。通过优化控制,能够充分利用软体机器人的动态特性,实现精确的运动控制。
技术框架:整体框架包括以下几个主要模块:1) 刚柔混合软体机器人的建模,采用几何变分应变模型;2) 基于模型的优化控制,包括直接配置法、微分动态规划和非线性模型预测控制三种策略;3) 隐式积分方案和热启动策略,用于提高数值鲁棒性和计算效率;4) 仿真实验,在多个基准系统上评估控制性能。
关键创新:最重要的技术创新点在于将几何变分应变模型与优化控制相结合,利用解析导数避免了数值微分,显著提高了计算效率,使得高维软体机器人的动态优化控制成为可能。与现有方法相比,该方法能够更准确地捕捉软体机器人的动态特性,实现更复杂的运动控制。
关键设计:论文采用了三种优化控制策略,并针对软体机器人的特点进行了调整。隐式积分方案用于处理刚性连续体动力学,热启动策略用于加速优化过程。具体参数设置和损失函数的设计取决于具体的优化控制策略和任务需求,例如,在直接配置法中,需要选择合适的配置点和约束条件;在微分动态规划中,需要设计合适的成本函数和迭代策略。
🖼️ 关键图片
📊 实验亮点
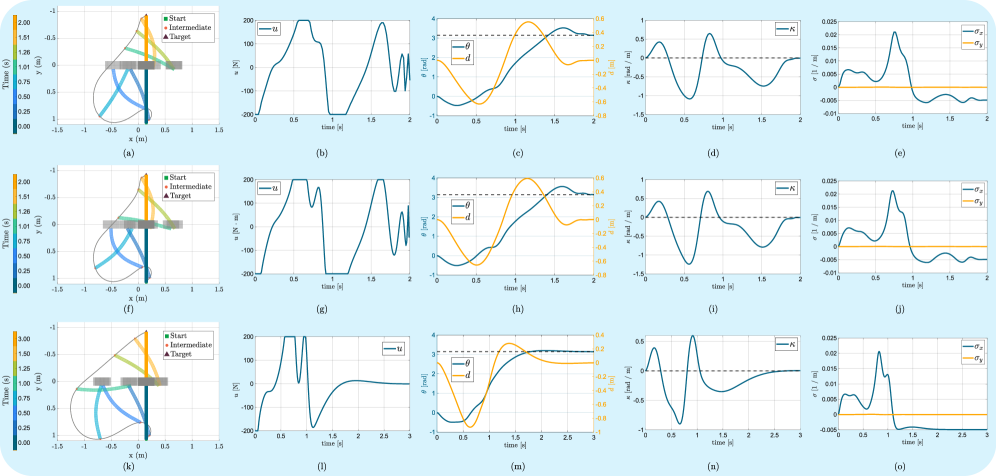
论文在软体小车-杆、软体Pendubot和软体Furuta摆等基准系统上进行了仿真实验,验证了三种优化控制策略的有效性。实验结果表明,所提出的方法能够成功实现动态摆动任务,并且在计算效率方面具有显著优势。通过对比不同控制策略的性能,揭示了它们在不同应用场景下的优缺点。
🎯 应用场景
该研究成果可应用于医疗机器人、搜救机器人、人机协作等领域。软体机器人在复杂环境中具有良好的适应性和安全性,能够执行精细操作和与人类安全交互。通过精确的动态控制,可以扩展软体机器人的应用范围,使其能够完成更复杂的任务,例如微创手术、灾难救援和柔性制造。
📄 摘要(原文)
Continuum soft robots are inherently underactuated and subject to intrinsic input constraints, making dynamic control particularly challenging, especially in hybrid rigid-soft robots. While most existing methods focus on quasi-static behaviors, dynamic tasks such as swing-up require accurate exploitation of continuum dynamics. This has led to studies on simple low-order template systems that often fail to capture the complexity of real continuum deformations. Model-based optimal control offers a systematic solution; however, its application to rigid-soft robots is often limited by the computational cost and inaccuracy of numerical differentiation for high-dimensional models. Building on recent advances in the Geometric Variable Strain model that enable analytical derivatives, this work investigates three optimal control strategies for underactuated soft systems-Direct Collocation, Differential Dynamic Programming, and Nonlinear Model Predictive Control-to perform dynamic swing-up tasks. To address stiff continuum dynamics and constrained actuation, implicit integration schemes and warm-start strategies are employed to improve numerical robustness and computational efficiency. The methods are evaluated in simulation on three Rigid-Soft and high-order soft benchmark systems-the Soft Cart-Pole, the Soft Pendubot, and the Soft Furuta Pendulum- highlighting their performance and computational trade-offs.