Learning-based Adaptive Control of Quadruped Robots for Active Stabilization on Moving Platforms
作者: Minsung Yoon, Heechan Shin, Jeil Jeong, Sung-Eui Yoon
分类: cs.RO
发布日期: 2026-02-03
备注: Accepted to IROS 2024. Project Page
💡 一句话要点
提出LAS-MP,用于四足机器人在移动平台上的主动稳定控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 强化学习 主动稳定 移动平台 状态估计 自平衡 机器人控制
📋 核心要点
- 四足机器人在移动平台上平衡面临挑战,现有方法难以有效应对平台运动带来的复杂惯性力。
- LAS-MP通过学习自平衡策略,自适应调整机器人姿态,并利用状态估计器推断机器人和平台状态。
- 实验表明,LAS-MP在平衡性能上优于基线方法,消融实验验证了各组件的有效性。
📝 摘要(中文)
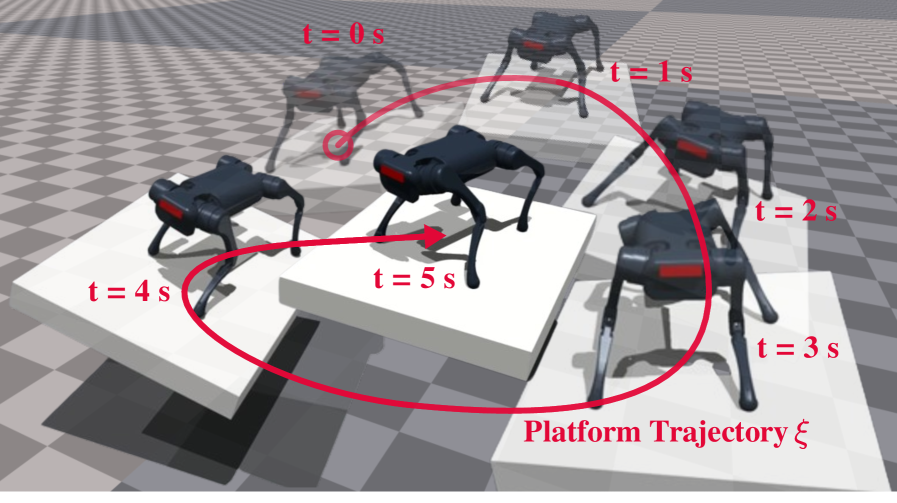
本文提出了一种名为“基于学习的移动平台主动稳定”(LAS-MP)的方法,旨在解决四足机器人在六自由度移动平台(如地铁、公交、飞机和游艇)上保持平衡的难题。该方法包含一个自平衡策略和系统状态估计器。该策略能够自适应地调整机器人的姿态,以应对平台的运动。状态估计器则基于本体传感器数据推断机器人和平台的状态。为了系统地训练各种平台运动,本文还引入了平台轨迹生成和调度方法。评估结果表明,与三个基线方法相比,LAS-MP在多个指标上都表现出卓越的平衡性能。此外,本文还对LAS-MP进行了详细分析,包括消融研究和估计器评估,以验证每个组件的有效性。
🔬 方法详解
问题定义:四足机器人在移动平台上保持平衡是一个复杂的问题,因为平台具有六个自由度的运动,这会导致机器人受到各种惯性力的影响。现有的控制方法可能难以适应这些动态变化,导致机器人失去平衡。因此,需要一种能够主动适应平台运动的控制策略。
核心思路:本文的核心思路是利用强化学习训练一个自平衡策略,该策略能够根据平台的状态信息,自适应地调整机器人的姿态,从而抵消平台运动带来的影响。同时,使用状态估计器来准确地估计机器人和平台的状态,为控制策略提供可靠的输入。
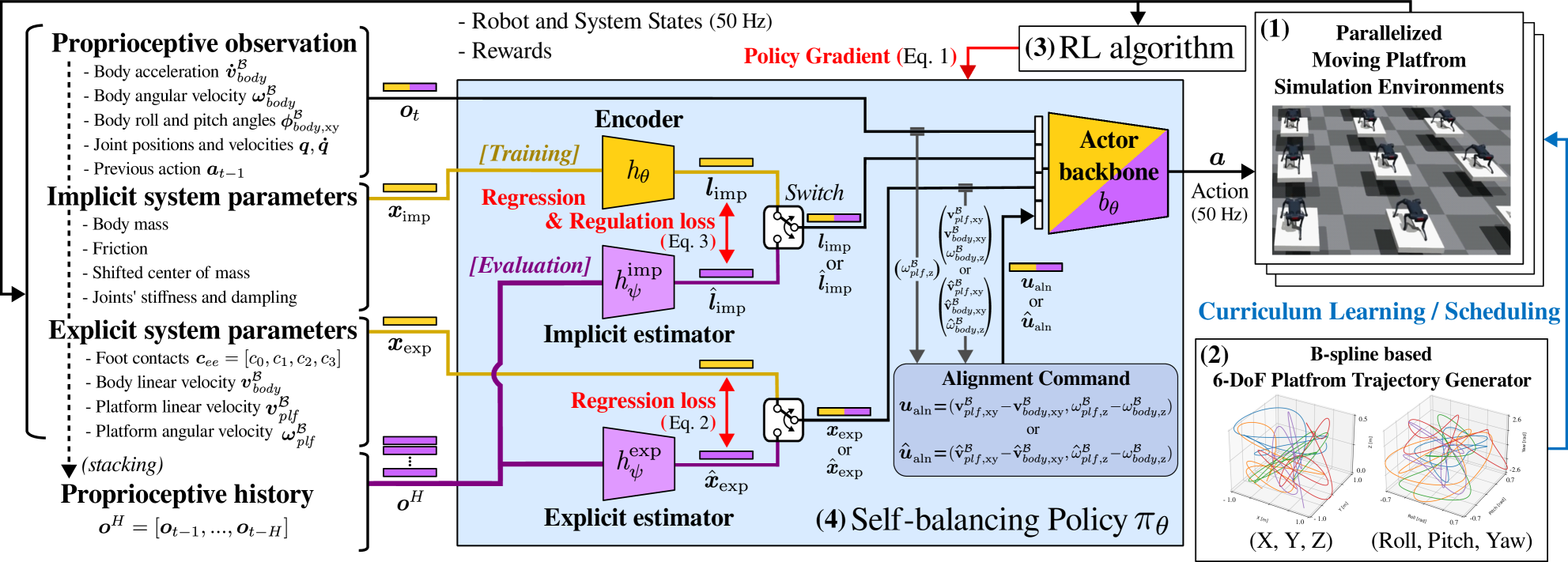
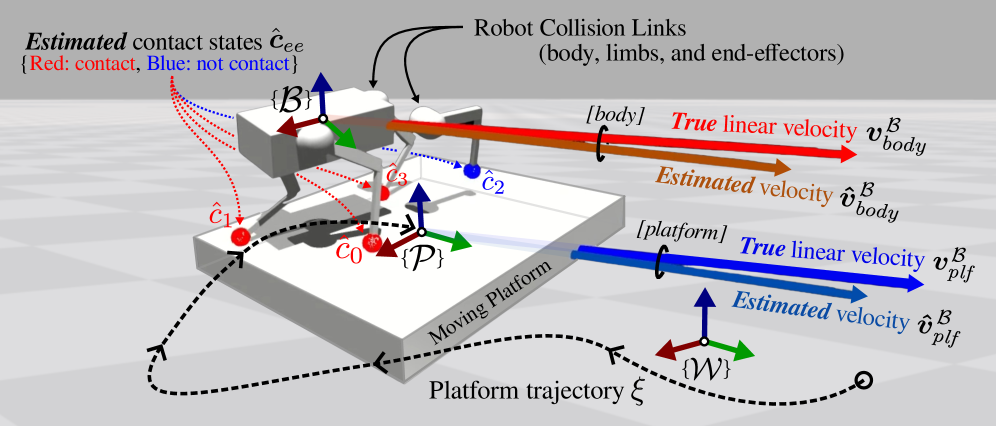
技术框架:LAS-MP的整体框架包括以下几个主要模块:1) 平台轨迹生成器:生成各种不同的平台运动轨迹,用于训练强化学习策略。2) 状态估计器:利用机器人自身的传感器数据(如IMU、关节角度等)来估计机器人和平台的状态。3) 自平衡策略:基于强化学习训练得到的策略,根据状态估计器的输出,控制机器人的关节运动,从而保持平衡。4) 仿真环境:用于训练和评估LAS-MP的性能。
关键创新:本文最重要的技术创新点在于将强化学习应用于四足机器人在移动平台上的平衡控制。与传统的控制方法相比,强化学习能够更好地适应平台的动态变化,并学习到更加鲁棒的控制策略。此外,本文还提出了平台轨迹生成和调度方法,能够系统地训练各种平台运动。
关键设计:在强化学习方面,本文使用了Actor-Critic算法,其中Actor网络用于生成控制策略,Critic网络用于评估策略的性能。损失函数包括平衡损失、运动损失和能量消耗损失。状态估计器使用了扩展卡尔曼滤波器(EKF),融合了IMU和关节角度等传感器数据。平台轨迹生成器则根据不同的运动模式(如正弦波、随机运动等)生成不同的轨迹。
🖼️ 关键图片
📊 实验亮点
实验结果表明,LAS-MP在平衡性能上显著优于三个基线方法。具体而言,LAS-MP能够将机器人的倾斜角度降低50%以上,并且能够更好地抵抗平台的扰动。消融实验验证了状态估计器和自平衡策略的有效性,表明每个组件都对整体性能有重要贡献。
🎯 应用场景
该研究成果可应用于各种需要在移动平台上工作的四足机器人,例如在行驶中的火车或轮船上进行巡检、维护或救援任务。此外,该技术还可以扩展到其他类型的移动机器人,提高其在复杂环境中的适应性和稳定性,具有重要的实际应用价值和广阔的发展前景。
📄 摘要(原文)
A quadruped robot faces balancing challenges on a six-degrees-of-freedom moving platform, like subways, buses, airplanes, and yachts, due to independent platform motions and resultant diverse inertia forces on the robot. To alleviate these challenges, we present the Learning-based Active Stabilization on Moving Platforms (\textit{LAS-MP}), featuring a self-balancing policy and system state estimators. The policy adaptively adjusts the robot's posture in response to the platform's motion. The estimators infer robot and platform states based on proprioceptive sensor data. For a systematic training scheme across various platform motions, we introduce platform trajectory generation and scheduling methods. Our evaluation demonstrates superior balancing performance across multiple metrics compared to three baselines. Furthermore, we conduct a detailed analysis of the \textit{LAS-MP}, including ablation studies and evaluation of the estimators, to validate the effectiveness of each component.