Manipulation via Force Distribution at Contact
作者: Haegu Lee, Yitaek Kim, Casper Hewson Rask, Christoffer Sloth
分类: cs.RO
发布日期: 2026-02-03
💡 一句话要点
提出基于力分布线接触模型的操作方法,提升接触操作的效率和鲁棒性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 接触操作 力分布 线接触模型 轨迹优化 iLQR 机器人控制 双层优化
📋 核心要点
- 接触操作需要精确建模物体与机器人之间的交互,现有方法依赖于计算效率高的点接触模型,但其无法捕捉摩擦动力学和扭矩生成。
- 论文提出了力分布线接触(FDLC)模型,旨在更准确地模拟接触操作中的力学特性,从而提升操作的真实性和控制效果。
- 实验结果表明,FDLC模型能够生成更高效、更鲁棒的轨迹,降低控制工作量,并减少机器人的运动幅度,验证了其有效性。
📝 摘要(中文)
本文提出了一种用于接触操作的力分布线接触(FDLC)模型,并将其与传统的点接触模型进行了比较。研究构建了一个双层优化框架,其中底层优化用于计算接触力,而上层优化应用iLQR进行轨迹优化。通过该框架,论文展示了点接触模型的局限性,并验证了FDLC在生成高效和鲁棒轨迹方面的优势。通过一个旋转盒子的任务验证了所提出方法的有效性,表明FDLC能够通过沿接触线进行非均匀力分布来生成轨迹,同时降低控制工作量和减少机器人的运动。
🔬 方法详解
问题定义:现有接触操作方法通常采用点接触模型,虽然计算效率高,但无法准确捕捉接触过程中的摩擦动力学和扭矩生成,导致操作轨迹效率低、鲁棒性差,难以实现类似人类的复杂接触操作。
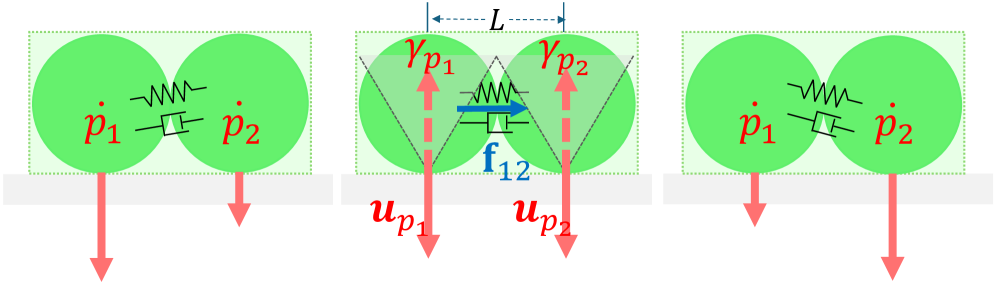
核心思路:论文的核心思路是使用力分布线接触(FDLC)模型替代传统的点接触模型。FDLC模型能够模拟接触线上的力分布,更真实地反映接触过程中的力学特性,从而优化轨迹规划,提升操作的效率和鲁棒性。
技术框架:论文构建了一个双层优化框架。底层优化问题用于计算接触力,该优化问题基于FDLC模型,旨在找到满足约束条件的最优力分布。上层优化问题应用迭代线性二次调节器(iLQR)进行轨迹优化,其目标是生成高效且鲁棒的机器人运动轨迹。上下层优化迭代进行,直至收敛。
关键创新:关键创新在于提出了FDLC模型,该模型能够模拟接触线上的力分布,更准确地反映接触过程中的力学特性。与传统的点接触模型相比,FDLC模型能够更好地捕捉摩擦动力学和扭矩生成,从而优化轨迹规划,提升操作的效率和鲁棒性。
关键设计:FDLC模型通过离散化接触线,将接触力表示为一系列离散力向量。底层优化问题通常被表述为一个二次规划问题,其目标函数包含控制力矩最小化等项,约束条件包括摩擦锥约束、力平衡约束等。iLQR算法用于求解上层轨迹优化问题,其目标函数通常包含状态误差和控制力矩的惩罚项。
🖼️ 关键图片

📊 实验亮点
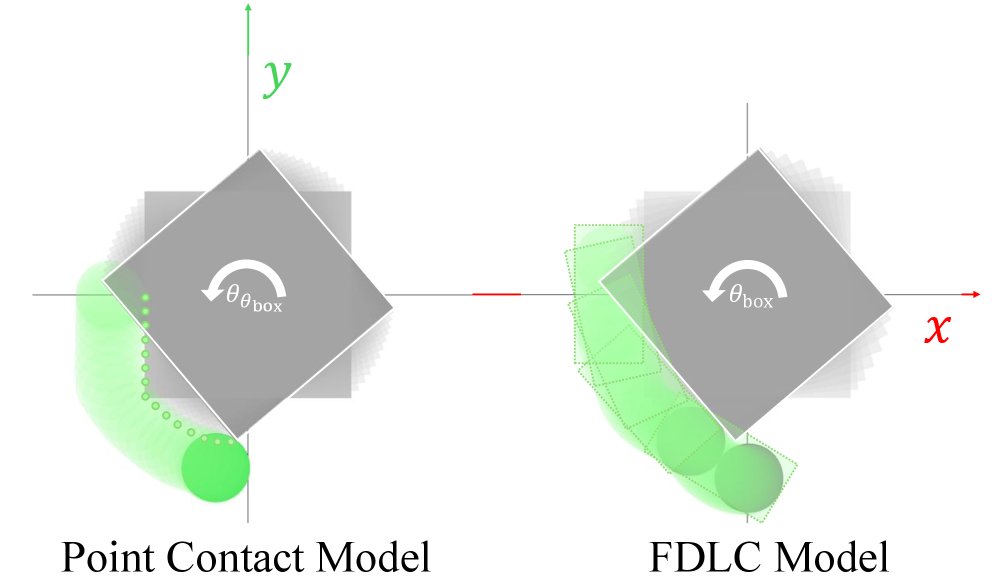
论文通过旋转盒子的实验验证了FDLC模型的有效性。实验结果表明,与点接触模型相比,FDLC模型能够生成更高效、更鲁棒的轨迹,降低控制工作量,并减少机器人的运动幅度。具体而言,FDLC模型能够通过沿接触线进行非均匀力分布来优化轨迹,从而实现更好的操作性能。量化指标的提升幅度未知,需要在论文中查找具体数据。
🎯 应用场景
该研究成果可应用于需要高精度接触操作的机器人领域,例如装配、抓取、操作等。通过更精确的接触建模,可以提升机器人在复杂环境下的操作能力,降低控制难度,提高操作效率和鲁棒性。未来,该方法有望应用于医疗机器人、工业机器人等领域,实现更智能、更灵活的机器人操作。
📄 摘要(原文)
Efficient and robust trajectories play a crucial role in contact-rich manipulation, which demands accurate mod- eling of object-robot interactions. Many existing approaches rely on point contact models due to their computational effi- ciency. Simple contact models are computationally efficient but inherently limited for achieving human-like, contact-rich ma- nipulation, as they fail to capture key frictional dynamics and torque generation observed in human manipulation. This study introduces a Force-Distributed Line Contact (FDLC) model in contact-rich manipulation and compares it against conventional point contact models. A bi-level optimization framework is constructed, in which the lower-level solves an optimization problem for contact force computation, and the upper-level optimization applies iLQR for trajectory optimization. Through this framework, the limitations of point contact are demon- strated, and the benefits of the FDLC in generating efficient and robust trajectories are established. The effectiveness of the proposed approach is validated by a box rotating task, demonstrating that FDLC enables trajectories generated via non-uniform force distributions along the contact line, while requiring lower control effort and less motion of the robot.