Estimation of Ground Reaction Forces from Kinematic Data during Locomotion
作者: Gautami Golani, Dong Anh Khoa To, Ananda Sidarta, Arun-Kumar Kaliya-Perumal, Oliver Roberts, Lek Syn Lim, Jim Patton, Domenico Campolo
分类: cs.RO
发布日期: 2026-02-03
💡 一句话要点
提出一种仅依赖运动学数据的步态地面反作用力估计方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 地面反作用力估计 运动学数据 步态分析 质心估计 无需测力台
📋 核心要点
- 现有步态分析依赖测力台,限制了其在临床环境中的广泛应用,需要一种无需测力台的GRF估计方法。
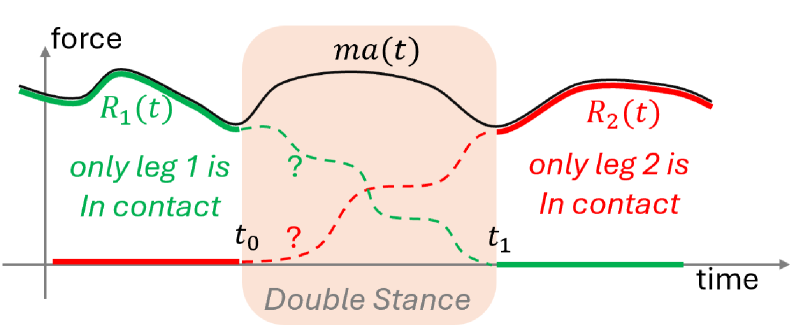
- 该方法仅使用运动学数据估计质心(CoM),进而计算GRF,并通过最小化方法分解GRF为各个分量。
- 实验结果验证了该方法仅使用运动学数据估计CoM和GRF的可行性,为无需测力台的步态分析提供了支持。
📝 摘要(中文)
地面反作用力(GRF)为深入了解人体步态力学提供了基础,并广泛用于评估关节负荷、肢体对称性、平衡控制和运动功能。尽管GRF具有临床相关性,但由于测力台系统的实际限制,GRF在临床工作流程中的应用仍然不足。本文提出了一种无需测力台的方法,仅使用基于标记的运动捕捉数据来估计GRF。这种仅使用运动学数据来估计和分解GRF的方法非常适合广泛的临床部署。通过使用来自十六个身体节段的运动学数据,我们估计质心(CoM)并计算GRF,然后通过基于最小化的方法将GRF分解为各个分量。通过这个框架,我们可以识别步态站立阶段,并提供对临床上有意义的动力学指标的访问,而无需专门的测力台系统。实验结果表明,仅基于运动学数据估计CoM和GRF是可行的,支持无需测力台的步态分析。
🔬 方法详解
问题定义:论文旨在解决在缺乏测力台的情况下,如何仅利用运动学数据准确估计地面反作用力(GRF)的问题。现有方法依赖于昂贵且不易部署的测力台,限制了步态分析在临床和日常环境中的应用。因此,开发一种无需测力台的GRF估计方法具有重要意义。
核心思路:论文的核心思路是利用人体运动学数据(例如,通过运动捕捉系统获取的身体各部位的运动轨迹)来估计人体的质心(CoM),然后基于牛顿第二定律,通过CoM的加速度来计算GRF。随后,采用基于最小化的方法将总的GRF分解为各个分量,从而更精细地分析步态。
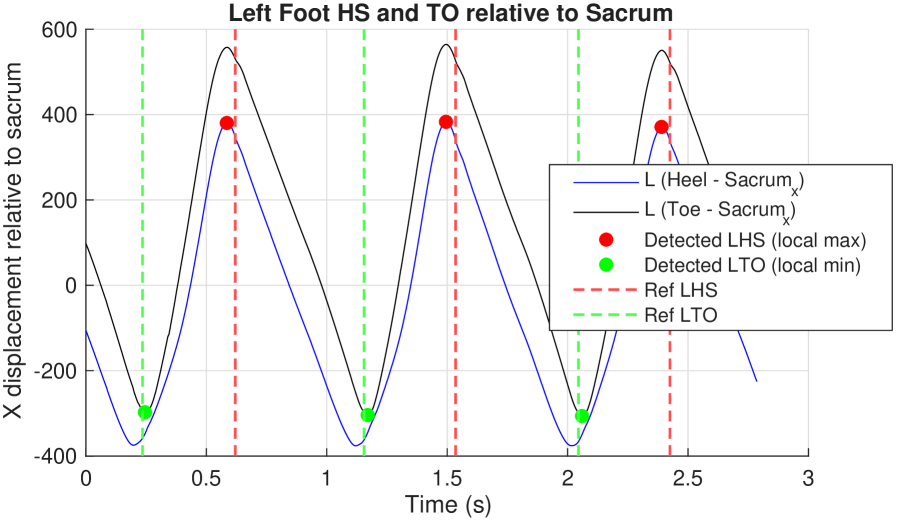
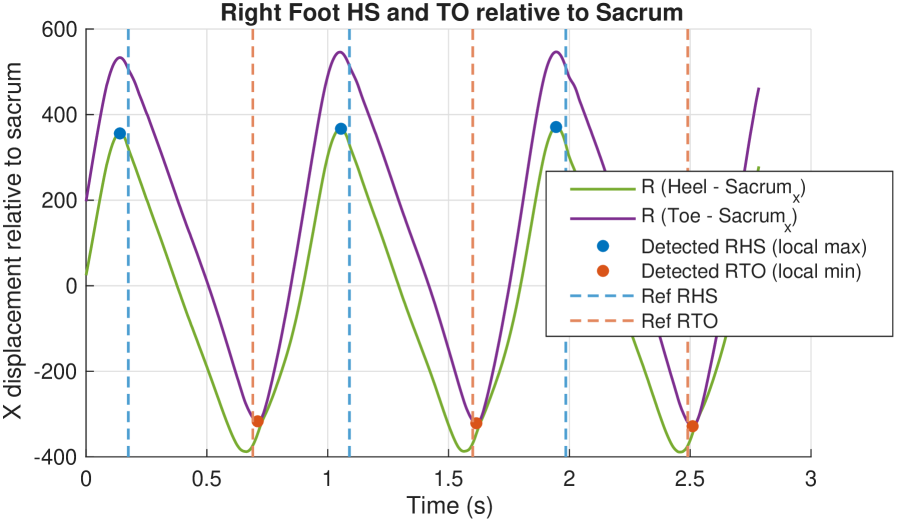
技术框架:该方法的技术框架主要包括以下几个阶段:1) 数据采集:使用运动捕捉系统获取人体16个身体节段的运动学数据。2) 质心估计:基于运动学数据,估计人体的质心(CoM)位置。3) GRF计算:根据CoM的加速度,利用牛顿第二定律计算总的GRF。4) GRF分解:使用基于最小化的方法,将总的GRF分解为各个分量。5) 步态分析:基于估计的GRF,识别步态站立阶段,并提取临床相关的动力学指标。
关键创新:该方法最重要的技术创新点在于,它完全依赖于运动学数据来估计GRF,无需任何测力台。这使得步态分析可以在更广泛的环境中进行,例如临床诊所、家庭环境等。与现有方法相比,该方法具有更高的灵活性和可扩展性。
关键设计:论文中一个关键的设计是使用基于最小化的方法来分解GRF。具体来说,该方法通过最小化估计的GRF与实际GRF之间的差异(在有测力台数据的情况下),或者通过最小化GRF分量之间的不一致性(在没有测力台数据的情况下),来确定GRF的各个分量。此外,选择16个身体节段的运动学数据也是一个重要的设计选择,这需要在精度和计算复杂度之间进行权衡。
🖼️ 关键图片
📊 实验亮点
该研究通过实验验证了仅使用运动学数据估计GRF的可行性。虽然论文中没有提供具体的性能数据,但强调了该方法能够准确识别步态站立阶段,并提供临床上有意义的动力学指标。该方法为无需测力台的步态分析提供了有力的支持,具有重要的临床应用价值。
🎯 应用场景
该研究成果可广泛应用于临床步态分析、运动康复、运动训练和人机交互等领域。例如,医生可以使用该方法评估患者的步态异常,制定个性化的康复计划;运动员可以使用该方法优化运动姿势,提高运动表现;机器人研究人员可以使用该方法设计更自然、更安全的人机交互系统。未来,该技术有望集成到可穿戴设备中,实现实时的步态监测和反馈。
📄 摘要(原文)
Ground reaction forces (GRFs) provide fundamental insight into human gait mechanics and are widely used to assess joint loading, limb symmetry, balance control, and motor function. Despite their clinical relevance, the use of GRF remains underutilised in clinical workflows due to the practical limitations of force plate systems. In this work, we present a force-plate-free approach for estimating GRFs using only marker-based motion capture data. This kinematics only method to estimate and decompose GRF makes it well suited for widespread clinical depolyment. By using kinematics from sixteen body segments, we estimate the centre of mass (CoM) and compute GRFs, which are subsequently decomposed into individual components through a minimization-based approach. Through this framework, we can identify gait stance phases and provide access to clinically meaningful kinetic measures without a dedicated force plate system. Experimental results demonstrate the viability of CoM and GRF estimation based solely on kinematic data, supporting force-plate-free gait analysis.