3D Foundation Model-Based Loop Closing for Decentralized Collaborative SLAM
作者: Pierre-Yves Lajoie, Benjamin Ramtoula, Daniele De Martini, Giovanni Beltrame
分类: cs.RO
发布日期: 2026-02-02
💡 一句话要点
基于3D基础模型的去中心化协同SLAM闭环检测方法
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 协同SLAM 闭环检测 3D基础模型 多机器人系统 姿态图优化
📋 核心要点
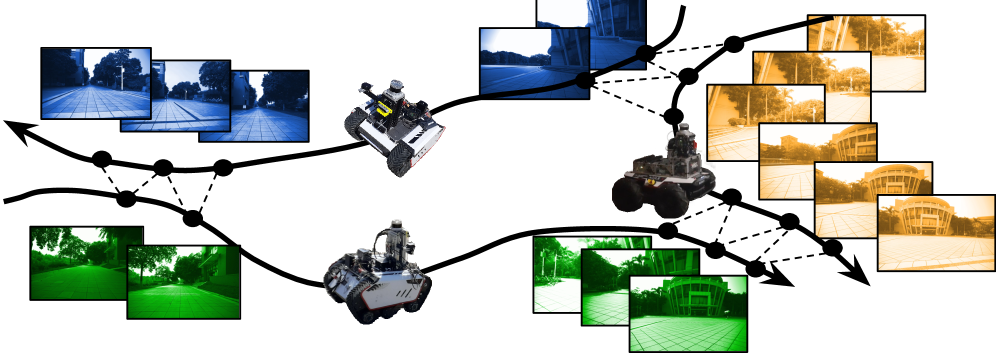
- 现有去中心化协同SLAM在视角差异大的情况下难以识别地图重叠,限制了其应用。
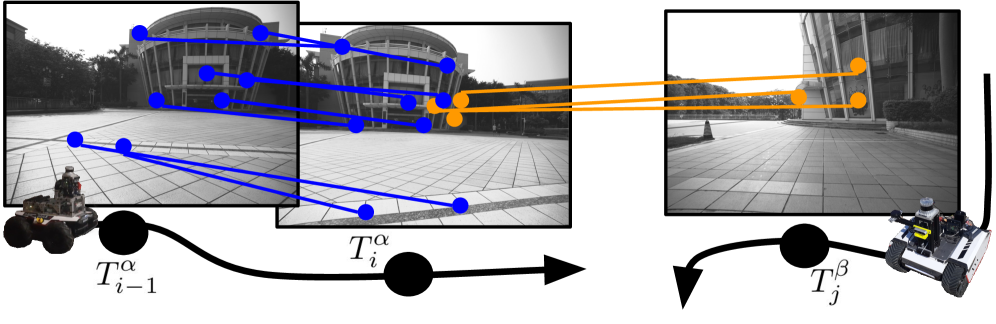
- 利用3D基础模型强大的图像配准能力,估计机器人间的相对位姿,实现稳健的闭环检测。
- 实验表明,该方法在定位和建图精度上优于现有方法,并显著提升了计算和内存效率。
📝 摘要(中文)
去中心化协同SLAM(C-SLAM)技术常因机器人视角差异大而难以识别地图重叠区域。受3D基础模型在视角变化下图像配准能力的启发,我们提出一种稳健的闭环检测方法,利用这些模型建立机器人间的测量关系。与集中式地图中需要完整3D重建的资源密集型方法不同,我们的方法将基础模型集成到现有SLAM流程中,从而实现可扩展且稳健的多机器人地图构建。我们的贡献包括:(1) 集成3D基础模型,以可靠地估计去中心化C-SLAM中单目图像对的相对位姿;(2) 引入鲁棒的异常值抑制技术,这对于使用这些相对位姿至关重要;(3) 开发专门的姿态图优化公式,以有效地解决尺度模糊问题。我们针对最先进的方法评估了我们的方法,证明了在定位和建图精度方面的改进,以及在计算和内存效率方面的显著提高。这些结果突出了我们的方法在大型多机器人场景中部署的潜力。
🔬 方法详解
问题定义:论文旨在解决去中心化协同SLAM中,由于不同机器人视角差异过大,导致难以准确识别地图重叠区域,从而影响协同定位和建图精度的问题。现有方法通常需要大量的计算资源进行全局地图重建,或者对视角变化非常敏感,难以适应实际场景的复杂性。
核心思路:论文的核心思路是利用近年来兴起的3D基础模型,其具有强大的跨视角图像配准能力,可以直接从不同视角的图像中估计出相对位姿。通过将这些相对位姿作为闭环约束,可以有效地校正SLAM系统中的累积误差,提高定位和建图的精度。
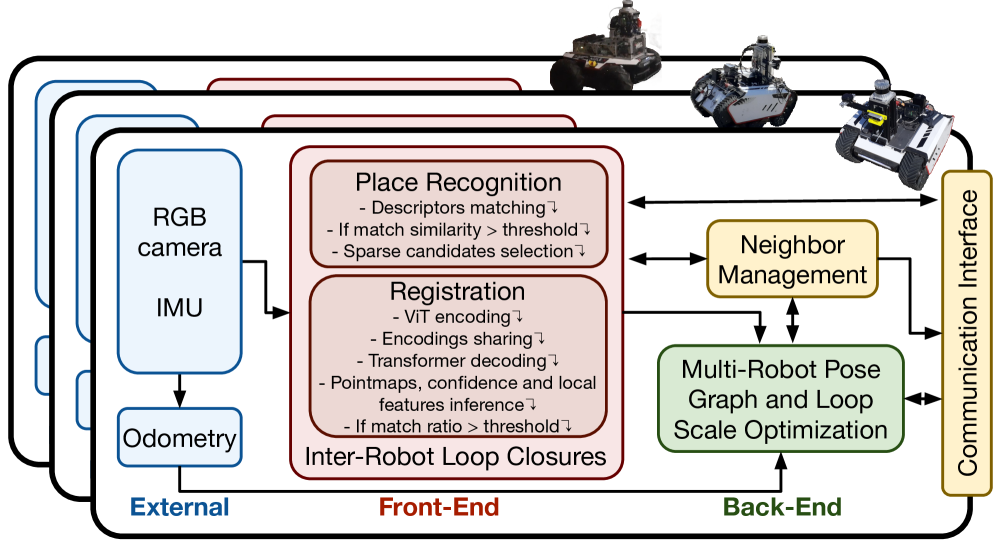
技术框架:该方法将3D基础模型集成到现有的去中心化协同SLAM框架中。主要流程包括:1) 机器人各自进行局部SLAM建图;2) 利用3D基础模型对不同机器人采集的图像进行匹配,估计相对位姿;3) 使用鲁棒的异常值剔除方法,去除错误的相对位姿估计;4) 构建姿态图,将局部地图和相对位姿约束进行优化,得到全局一致的地图。
关键创新:该方法最重要的创新点在于将3D基础模型引入到去中心化协同SLAM中,利用其强大的图像配准能力,解决了传统方法在视角变化大时难以进行闭环检测的问题。此外,论文还提出了鲁棒的异常值剔除方法和专门的姿态图优化公式,进一步提高了系统的稳定性和精度。
关键设计:论文的关键设计包括:1) 选择合适的3D基础模型,并针对SLAM任务进行微调;2) 设计鲁棒的异常值剔除方法,例如基于RANSAC的位姿估计;3) 构建专门的姿态图优化公式,例如考虑尺度漂移的优化目标函数。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在定位和建图精度方面优于现有方法,尤其是在视角变化较大的情况下。此外,该方法还显著提高了计算和内存效率,使其更适合在资源受限的机器人平台上部署。具体性能提升数据在论文中有详细展示,包括与state-of-the-art方法在公开数据集上的对比。
🎯 应用场景
该研究成果可应用于多机器人协同探索、搜救、环境监测等领域。例如,在灾难救援场景中,多个无人机可以利用该方法快速构建灾区地图,帮助救援人员进行定位和决策。此外,该方法还可以应用于自动驾驶、机器人导航等领域,提高机器人在复杂环境中的定位和建图能力。
📄 摘要(原文)
Decentralized Collaborative Simultaneous Localization And Mapping (C-SLAM) techniques often struggle to identify map overlaps due to significant viewpoint variations among robots. Motivated by recent advancements in 3D foundation models, which can register images despite large viewpoint differences, we propose a robust loop closing approach that leverages these models to establish inter-robot measurements. In contrast to resource-intensive methods requiring full 3D reconstruction within a centralized map, our approach integrates foundation models into existing SLAM pipelines, yielding scalable and robust multi-robot mapping. Our contributions include: (1) integrating 3D foundation models to reliably estimate relative poses from monocular image pairs within decentralized C-SLAM; (2) introducing robust outlier mitigation techniques critical to the use of these relative poses; and (3) developing specialized pose graph optimization formulations that efficiently resolve scale ambiguities. We evaluate our method against state-of-the-art approaches, demonstrating improvements in localization and mapping accuracy, alongside significant gains in computational and memory efficiency. These results highlight the potential of our approach for deployment in large-scale multi-robot scenarios.