Tilt-Ropter: A Novel Hybrid Aerial and Terrestrial Vehicle with Tilt Rotors and Passive Wheels
作者: Ruoyu Wang, Xuchen Liu, Zongzhou Wu, Zixuan Guo, Wendi Ding, Ben M. Chen
分类: cs.RO
发布日期: 2026-02-02
备注: 8 pages, 10 figures
💡 一句话要点
Tilt-Ropter:一种新型倾转旋翼混合陆空飞行器,实现高效多模态运动
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 混合陆空飞行器 倾转旋翼 全驱动控制 非线性模型预测控制 能量效率 多模态运动
📋 核心要点
- 现有欠驱动混合陆空飞行器在复杂环境下的移动性和适应性受限,难以实现精确控制。
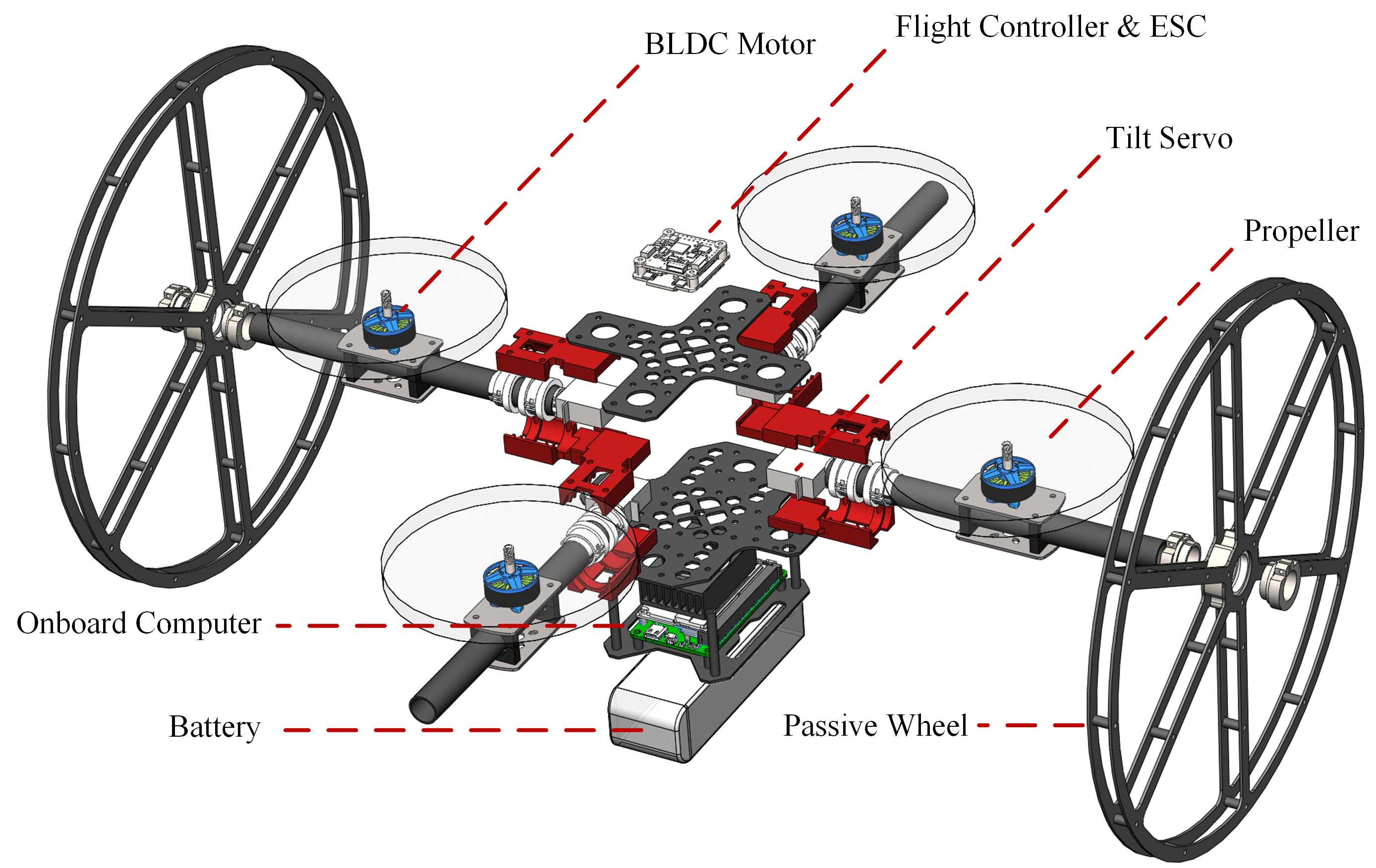
- Tilt-Ropter采用全驱动设计,通过倾转旋翼和被动轮的结合,实现力和力矩的解耦控制。
- 实验结果表明,该系统在空地转换和轨迹跟踪方面表现出色,地面运动功耗降低92.8%。
📝 摘要(中文)
本文提出了一种新型混合陆空飞行器(HATV)Tilt-Ropter,它结合了倾转旋翼和被动轮,以实现节能的多模式运动。与现有的欠驱动HATV不同,Tilt-Ropter的全驱动设计实现了力和力矩的解耦控制,大大增强了其移动性和环境适应性。开发了一种非线性模型预测控制器(NMPC),用于跟踪参考轨迹并处理跨运动模式的接触约束,同时一个专用的控制分配模块利用驱动冗余来实现执行器的高能效控制。此外,为了增强地面接触期间的鲁棒性,我们引入了一种外部wrench估计算法,该算法可以实时估计环境交互作用的力和力矩。该系统通过仿真和实际实验进行了验证,包括无缝的空地转换和轨迹跟踪。结果表明,在两种模式下都具有较低的跟踪误差,并突出了地面运动期间功耗降低92.8%,证明了该系统在大型和能源受限环境中执行长时间任务的潜力。
🔬 方法详解
问题定义:现有混合陆空飞行器(HATV)通常是欠驱动的,这意味着它们的控制自由度少于其运动自由度。这导致在复杂环境中难以实现精确控制和高机动性,尤其是在需要频繁切换飞行和地面运动模式时。此外,能量效率也是一个关键问题,因为飞行模式通常比地面模式消耗更多的能量。
核心思路:Tilt-Ropter的核心思路是采用全驱动设计,通过倾转旋翼和被动轮的结合,实现力和力矩的解耦控制。这种设计允许飞行器独立控制其位置和姿态,从而提高其在各种环境中的适应性和机动性。同时,通过优化控制分配,可以在地面运动时显著降低功耗。
技术框架:Tilt-Ropter的控制框架主要包括以下几个模块:1) 非线性模型预测控制器(NMPC):用于生成参考轨迹并处理运动模式切换时的约束。2) 控制分配模块:利用驱动冗余,优化执行器的控制,以实现能量效率。3) 外部Wrench估计模块:实时估计环境交互作用的力和力矩,提高地面接触时的鲁棒性。整个系统通过传感器获取状态信息,然后由NMPC生成控制指令,控制分配模块将指令分配给各个执行器,最后通过外部Wrench估计模块进行反馈校正。
关键创新:Tilt-Ropter的关键创新在于其全驱动的混合陆空设计。与传统的欠驱动HATV相比,Tilt-Ropter能够实现力和力矩的解耦控制,从而显著提高其机动性和环境适应性。此外,外部Wrench估计算法的引入增强了地面接触的鲁棒性,使得飞行器能够在不平坦的地面上稳定行驶。
关键设计:NMPC的设计需要仔细考虑状态空间、控制输入和约束条件。控制分配模块采用优化算法,例如二次规划,以最小化能量消耗。外部Wrench估计模块使用卡尔曼滤波器或其他状态估计方法,根据传感器数据估计环境作用力。具体的参数设置需要根据飞行器的物理特性和任务需求进行调整。
🖼️ 关键图片


📊 实验亮点
实验结果表明,Tilt-Ropter在空地转换和轨迹跟踪方面表现出色,具有较低的跟踪误差。最重要的是,地面运动期间的功耗降低了92.8%,这表明该系统在能源受限环境中具有显著的优势。仿真和实际实验验证了该系统的可行性和有效性。
🎯 应用场景
Tilt-Ropter具有广泛的应用前景,包括:1) 物流运输:在复杂地形和城市环境中进行高效的包裹递送。2) 灾害救援:在灾区进行搜索和救援任务,能够快速到达难以进入的区域。3) 环境监测:在各种环境中进行数据采集和监测,例如森林、山区和城市。4) 巡检维护:对基础设施进行巡检和维护,例如桥梁、电网和管道。
📄 摘要(原文)
In this work, we present Tilt-Ropter, a novel hybrid aerial-terrestrial vehicle (HATV) that combines tilt rotors with passive wheels to achieve energy-efficient multi-mode locomotion. Unlike existing under-actuated HATVs, the fully actuated design of Tilt-Ropter enables decoupled force and torque control, greatly enhancing its mobility and environmental adaptability. A nonlinear model predictive controller (NMPC) is developed to track reference trajectories and handle contact constraints across locomotion modes, while a dedicated control allocation module exploits actuation redundancy to achieve energy-efficient control of actuators. Additionally, to enhance robustness during ground contact, we introduce an external wrench estimation algorithm that estimates environmental interaction forces and torques in real time. The system is validated through both simulation and real-world experiments, including seamless air-ground transitions and trajectory tracking. Results show low tracking errors in both modes and highlight a 92.8% reduction in power consumption during ground locomotion, demonstrating the system's potential for long-duration missions across large-scale and energy-constrained environments.