FlyAware: Inertia-Aware Aerial Manipulation via Vision-Based Estimation and Post-Grasp Adaptation
作者: Biyu Ye, Na Fan, Zhengping Fan, Weiliang Deng, Hongming Chen, Qifeng Chen, Ximin Lyu
分类: cs.RO
发布日期: 2026-01-30
备注: 8 pages, 10 figures
💡 一句话要点
FlyAware:基于视觉估计和后抓取自适应的惯性感知空中操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 空中操作臂 惯性估计 自适应控制 视觉伺服 机器人控制
📋 核心要点
- 空中操作臂易受有效载荷和机械臂配置变化影响,导致惯性参数时变,现有方法难以有效处理。
- FlyAware框架通过视觉估计预先估计惯性参数,并在抓取后进行自适应调整,实现对惯性动力学的实时估计和适应。
- 实验验证了所提出的惯性感知自适应控制策略的有效性和可行性,为空中操作臂的后抓取控制提供了新思路。
📝 摘要(中文)
空中操作臂(AMs)因其相比传统多旋翼无人机更强的灵活性,在自动化运输和应急服务中越来越受到关注。然而,时变惯性参数的复杂性阻碍了它们的实际部署,这些参数对有效载荷变化和机械臂配置高度敏感。受人类与未知物体交互策略的启发,本文提出了一种用于鲁棒空中操作的新型机载框架。该系统集成了基于视觉的预抓取惯性估计模块和后抓取自适应机制,从而能够实时估计和适应惯性动力学。在控制方面,我们开发了一种基于增益调度的惯性感知自适应控制策略,并通过频域系统辨识评估其鲁棒性。我们的研究为AMs的后抓取控制提供了新的见解,并且真实世界的实验验证了所提出框架的有效性和可行性。
🔬 方法详解
问题定义:空中操作臂在实际应用中,由于有效载荷的变化和机械臂姿态的改变,其惯性参数是时变的且难以精确建模。现有的控制方法通常依赖于预先设定的固定参数,难以适应这种动态变化,导致控制性能下降甚至系统不稳定。因此,如何准确估计并实时适应空中操作臂的惯性参数是亟待解决的问题。
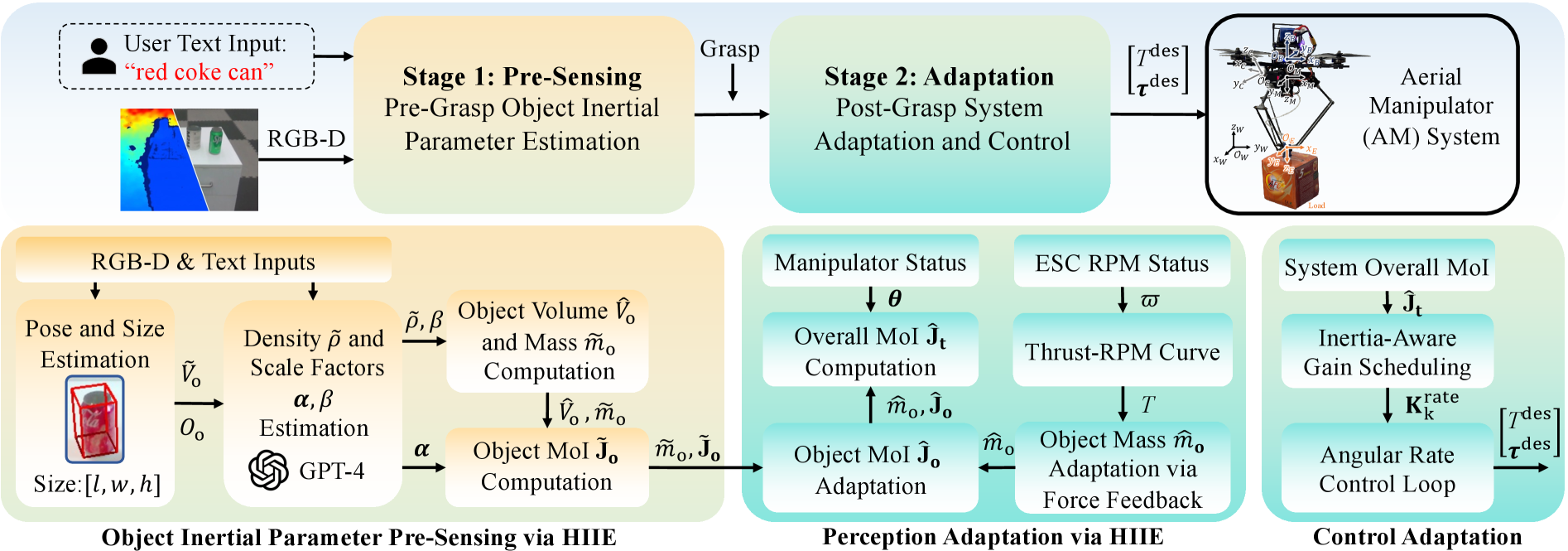
核心思路:FlyAware的核心思路是模仿人类与未知物体交互的方式,即先通过视觉观察估计物体的属性(如质量、形状等),然后在抓取后根据实际的交互情况进行调整。具体来说,系统首先利用视觉信息进行预抓取惯性估计,然后在抓取后通过自适应控制机制对惯性参数进行在线调整,从而实现对时变惯性参数的鲁棒控制。
技术框架:FlyAware框架主要包含两个模块:基于视觉的预抓取惯性估计模块和后抓取自适应控制模块。预抓取惯性估计模块利用机载相机获取目标物体的图像,通过视觉算法估计其质量、形状等属性,进而推算其惯性参数。后抓取自适应控制模块则在抓取完成后,利用传感器数据(如IMU、力/力矩传感器等)对惯性参数进行在线调整,并根据调整后的参数进行控制。整体流程为:视觉感知 -> 惯性估计 -> 抓取 -> 自适应控制。
关键创新:该论文的关键创新在于将视觉感知与自适应控制相结合,实现了对空中操作臂惯性参数的实时估计和适应。与传统的依赖固定参数的控制方法相比,FlyAware能够更好地适应时变惯性参数,从而提高控制性能和鲁棒性。此外,该论文还提出了一种基于增益调度的惯性感知自适应控制策略,进一步提高了系统的鲁棒性。
关键设计:在视觉惯性估计方面,可能采用了基于深度学习的目标检测和三维重建算法,以准确估计目标物体的形状和质量。在自适应控制方面,可能采用了基于李雅普诺夫理论的自适应律,以保证系统的稳定性。增益调度策略可能根据估计的惯性参数动态调整控制器的增益,以优化控制性能。具体的损失函数和网络结构等细节未知。
🖼️ 关键图片


📊 实验亮点
论文通过真实世界的实验验证了FlyAware框架的有效性和可行性。实验结果表明,该系统能够准确估计并实时适应空中操作臂的惯性参数,从而提高控制性能和鲁棒性。具体的性能数据和对比基线未知,但论文强调了该方法在实际场景中的应用潜力。
🎯 应用场景
FlyAware技术可广泛应用于自动化运输、应急服务、建筑维护等领域。例如,在灾后救援中,空中操作臂可以利用该技术抓取并搬运各种形状和重量的救援物资,而无需事先了解其具体参数。在建筑维护中,可以用于高空作业,例如更换高楼外墙的玻璃或进行其他维护工作。该技术有望提高空中操作臂的智能化水平和应用范围。
📄 摘要(原文)
Aerial manipulators (AMs) are gaining increasing attention in automated transportation and emergency services due to their superior dexterity compared to conventional multirotor drones. However, their practical deployment is challenged by the complexity of time-varying inertial parameters, which are highly sensitive to payload variations and manipulator configurations. Inspired by human strategies for interacting with unknown objects, this letter presents a novel onboard framework for robust aerial manipulation. The proposed system integrates a vision-based pre-grasp inertia estimation module with a post-grasp adaptation mechanism, enabling real-time estimation and adaptation of inertial dynamics. For control, we develop an inertia-aware adaptive control strategy based on gain scheduling, and assess its robustness via frequency-domain system identification. Our study provides new insights into post-grasp control for AMs, and real-world experiments validate the effectiveness and feasibility of the proposed framework.