Macro-Scale Electrostatic Origami Motor
作者: Alex S. Miller, Leo McElroy, Jeffrey H. Lang
分类: cs.RO, physics.app-ph
发布日期: 2026-01-29
💡 一句话要点
提出一种宏观尺度静电折纸电机,实现可折叠的连续旋转运动
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 折纸机器人 静电驱动 旋转电机 可折叠结构 电晕放电
📋 核心要点
- 现有可折叠机器人缺乏宏观尺度下可折叠的连续旋转致动器,限制了其运动能力和应用范围。
- 该论文提出了一种基于静电的宏观尺度折纸旋转电机,通过电晕放电产生扭矩,实现连续旋转运动。
- 实验结果表明,该电机具有较高的膨胀比和转速,以及一定的扭矩输出能力,验证了设计的可行性。
📝 摘要(中文)
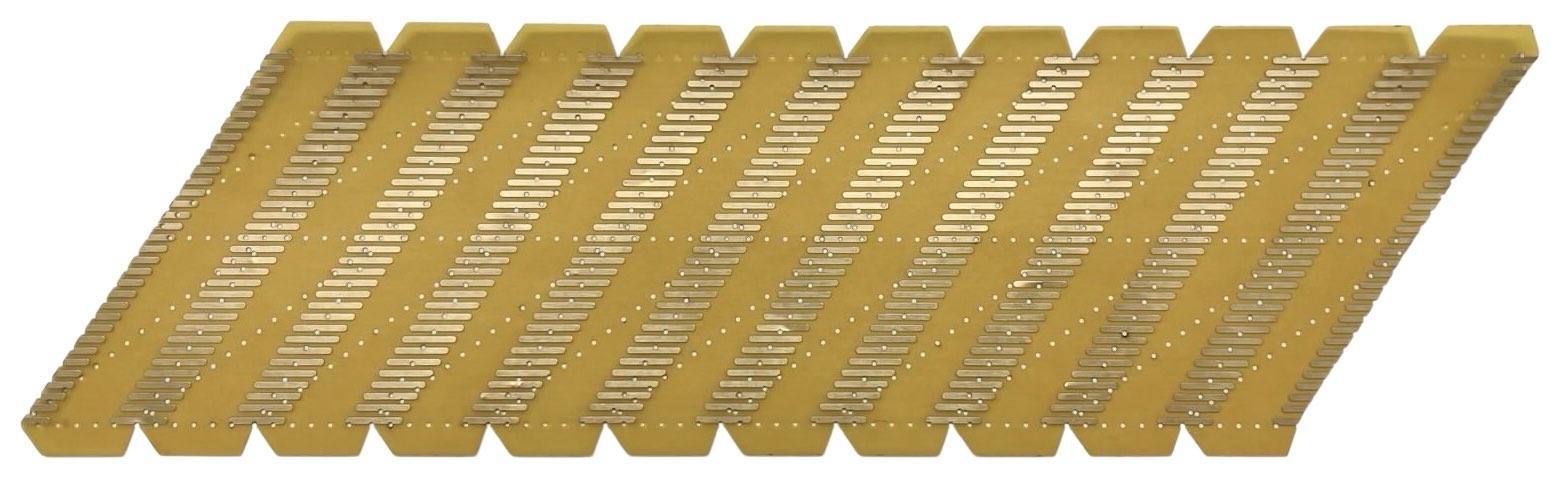
可折叠机器人因其高体积质量比、易于包装和形状适应性而成为机器人研究的热点。以往的可折叠机器人通常在结构中嵌入线性致动器或附加非折叠旋转电机来实现运动。此外,直接嵌入折叠介质结构中的致动器都用于线性或折叠运动,而非连续旋转运动。在宏观尺度上,尚未出现可折叠的连续旋转致动器。本文详细介绍了首个宏观尺度折纸旋转电机的开发和测试,该电机可以折叠平整,然后展开进行操作。该原型电机利用电晕放电产生扭矩,实现了2.5:1的膨胀比,在-29 kV电压下驱动时达到1440 rpm的最高速度,并表现出超过0.15 mN m的最大输出扭矩,有源元件的扭矩密度为0.04 Nm/kg。
🔬 方法详解
问题定义:现有可折叠机器人通常依赖于线性致动器或附加的非折叠旋转电机来实现运动,这增加了机器人的复杂性和体积。在宏观尺度上,缺乏能够折叠平整并展开进行连续旋转运动的致动器,限制了可折叠机器人在需要旋转运动的场景中的应用。
核心思路:该论文的核心思路是利用折纸结构的可折叠性和静电驱动的优势,设计一种宏观尺度的折纸旋转电机。通过巧妙的折纸设计,使得电机可以折叠平整,便于携带和部署;通过电晕放电产生静电力,驱动电机旋转,实现连续旋转运动。
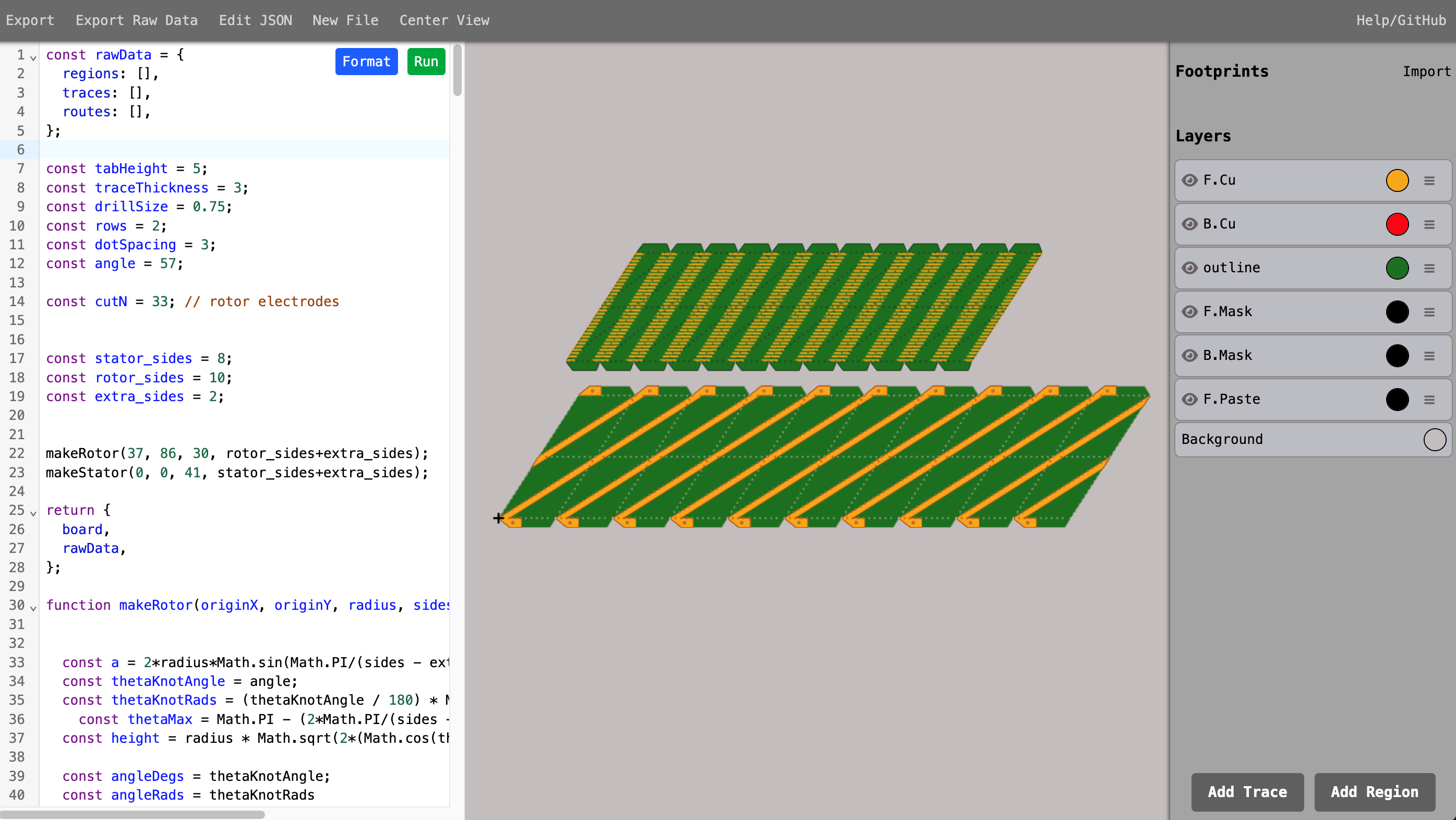
技术框架:该折纸电机主要由以下几个部分组成:一个可折叠的折纸结构,作为电机的转子;一个或多个电极,用于产生电晕放电;一个高压电源,用于驱动电极产生电晕放电。当电极施加高压时,会在周围产生电晕放电,电离空气中的分子,形成离子。这些离子在电场的作用下移动,撞击转子,产生静电力,驱动转子旋转。
关键创新:该论文最重要的技术创新点在于将折纸结构与静电驱动相结合,设计了一种可折叠的宏观尺度旋转电机。这种电机具有体积小、重量轻、易于携带和部署等优点,同时能够实现连续旋转运动,为可折叠机器人的运动方式提供了新的选择。与传统的电机相比,该电机不需要复杂的机械结构,降低了制造成本和复杂度。
关键设计:电机的关键设计包括折纸结构的形状和尺寸、电极的形状和位置、以及高压电源的参数。折纸结构的形状和尺寸决定了电机的膨胀比和旋转半径;电极的形状和位置决定了电场的分布和静电力的方向;高压电源的参数决定了电晕放电的强度和离子的数量。论文中对这些参数进行了优化,以获得最佳的电机性能。
🖼️ 关键图片

📊 实验亮点
该原型电机实现了2.5:1的膨胀比,表明其具有良好的可折叠性。在-29 kV电压下驱动时,电机达到了1440 rpm的最高速度,证明了其具有较高的旋转速度。此外,电机还表现出超过0.15 mN m的最大输出扭矩,有源元件的扭矩密度为0.04 Nm/kg,表明其具有一定的负载能力。这些实验结果验证了该设计的可行性和有效性。
🎯 应用场景
该研究成果可应用于可折叠机器人、便携式设备、微型无人机等领域。例如,可用于开发能够进入狭小空间进行侦察或维修的可折叠机器人;可用于设计便携式的旋转设备,如风扇、泵等;还可用于开发具有特殊运动模式的微型无人机。该研究为可折叠机器人的运动方式提供了新的思路,具有重要的应用价值和发展前景。
📄 摘要(原文)
Foldable robots have been an active area of robotics research due to their high volume-to-mass ratio, easy packability, and shape adaptability. For locomotion, previously developed foldable robots have either embedded linear actuators in, or attached non-folding rotary motors to, their structure. Further, those actuators directly embedded in the structure of the folding medium all contributed to linear or folding motion, not to continuous rotary motion. On the macro-scale there has not yet been a folding continuous rotary actuator. This paper details the development and testing of the first macro-scale origami rotary motor that can be folded flat, and then unfurled to operate. Using corona discharge for torque production, the prototype motor achieved an expansion ratio of 2.5:1, reached a top speed of 1440 rpm when driven at -29 kV, and exhibited a maximum output torque over 0.15 mN m with an active component torque density of 0.04 Nm/kg.