DSCD-Nav: Dual-Stance Cooperative Debate for Object Navigation
作者: Weitao An, Qi Liu, Chenghao Xu, Jiayi Chai, Xu Yang, Kun Wei, Cheng Deng
分类: cs.RO
发布日期: 2026-01-29
💡 一句话要点
提出DSCD-Nav,通过双立场协同辩论提升零样本物体导航的可靠性。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 物体导航 零样本学习 视觉语言模型 协同辩论 机器人
📋 核心要点
- 现有零样本物体导航系统依赖单次评分决策,易产生过度自信的长程误差和冗余探索。
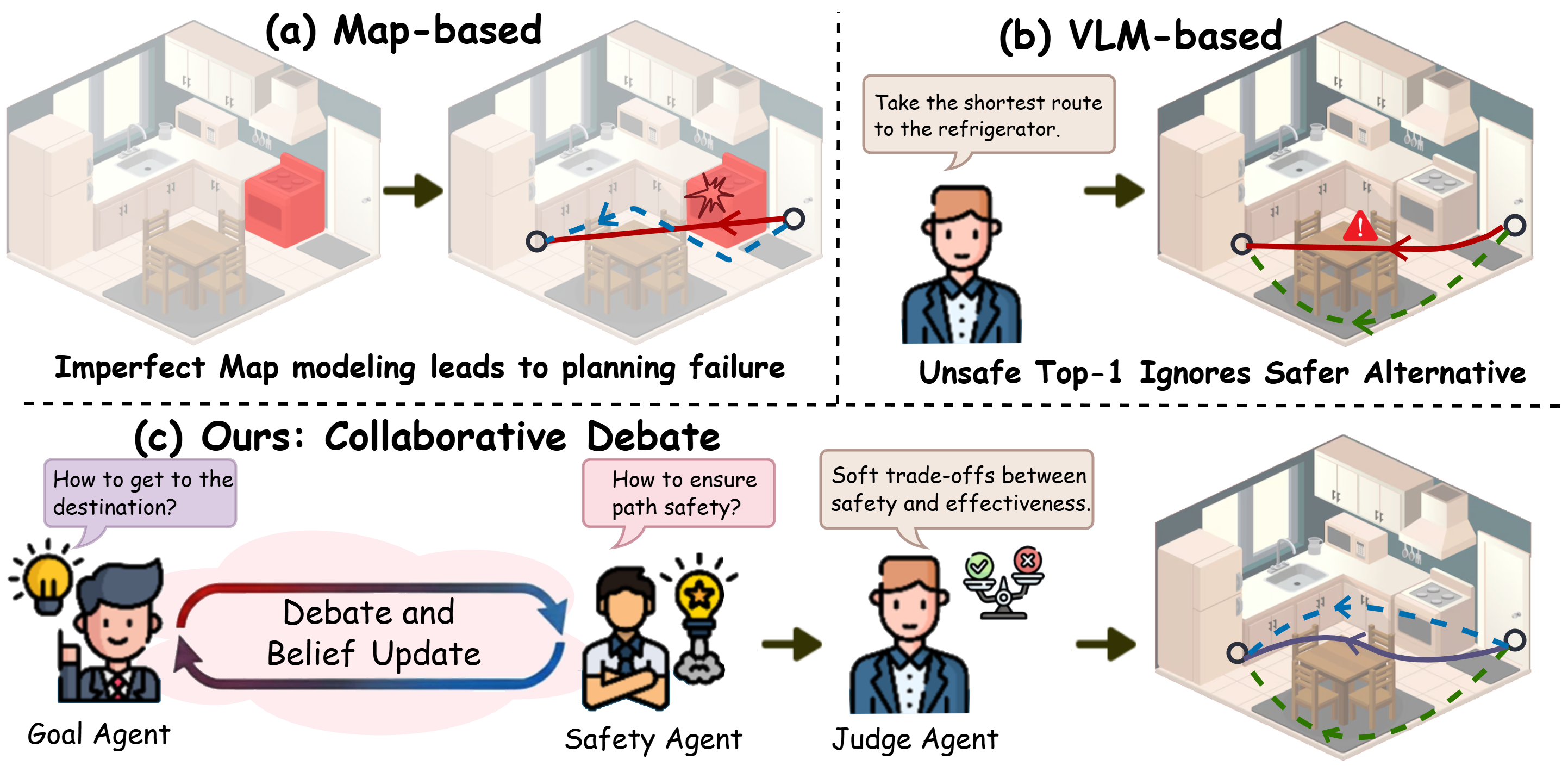
- DSCD-Nav构建任务场景理解和安全信息平衡双立场,通过协同辩论和证据仲裁提升决策可靠性。
- 实验表明,DSCD-Nav在多个数据集上提升了导航成功率和路径效率,并减少了探索冗余。
📝 摘要(中文)
本文提出了一种双立场协同辩论导航(DSCD-Nav)方法,旨在解决零样本物体导航中单次决策导致的过度自信和冗余探索问题。DSCD-Nav采用一种决策机制,以基于立场的交叉检查和证据感知的仲裁取代单次评分,从而提高部分可观测性下的动作可靠性。具体而言,对于相同的观测和候选动作集,该方法通过不同的互补目标显式构建两个立场:任务-场景理解(TSU)立场,优先考虑场景布局线索中的目标进展;安全-信息平衡(SIB)立场,强调风险和信息价值。这两个立场进行协同辩论,并通过线索引导的论证交叉检查其最佳候选者来制定策略。然后,采用导航共识仲裁(NCA)代理来整合双方的理由和证据,并可选择触发轻量级的微探测来验证不确定的选择,从而在消除歧义的同时保持NCA的主要意图。在HM3Dv1、HM3Dv2和MP3D上的实验表明,该方法在成功率和路径效率方面均有持续改进,同时减少了探索冗余。
🔬 方法详解
问题定义:现有基于视觉-语言模型的零样本物体导航系统,在决策层通常采用单次评分机制,这导致在长程导航中容易出现过度自信的错误,并且会产生不必要的探索行为。尤其是在部分可观测的环境中,这种问题更加突出。因此,需要一种更可靠的决策机制,以减少错误并提高导航效率。
核心思路:DSCD-Nav的核心思路是引入“辩论”的概念,通过构建两个具有不同侧重点的“立场”(Task-Scene Understanding和Safety-Information Balancing)来对候选动作进行交叉验证。每个立场都会根据自身的偏好对动作进行评估,然后通过一个仲裁机制来综合考虑双方的意见,从而做出更稳健的决策。这种设计模仿了人类在复杂情境下的决策过程,旨在减少单一视角带来的偏差。
技术框架:DSCD-Nav的整体框架包含以下几个主要模块:1) 双立场构建:根据相同的观测和候选动作集,构建TSU和SIB两个立场。TSU立场关注任务进展和场景布局,SIB立场关注安全风险和信息价值。2) 协同辩论:两个立场分别对候选动作进行评估,并提出支持或反对的理由。3) 导航共识仲裁(NCA):NCA代理整合两个立场的理由和证据,做出最终决策。如果NCA对某些选择不确定,可以触发轻量级的微探测来收集更多信息。
关键创新:DSCD-Nav的关键创新在于引入了双立场协同辩论的决策机制。与传统的单次评分方法不同,DSCD-Nav通过多个角度的评估和交叉验证来提高决策的可靠性。此外,NCA代理的引入使得系统能够综合考虑不同立场的意见,从而做出更明智的决策。微探测机制则允许系统在不确定情况下主动获取更多信息,进一步提高了导航的鲁棒性。
关键设计:TSU立场和SIB立场的具体实现方式未知,论文中可能使用了不同的神经网络结构或损失函数来训练这两个立场。NCA代理的具体实现方式也未知,可能采用了某种注意力机制或融合策略来整合两个立场的信息。微探测机制的具体实现方式也未知,可能涉及主动探索策略或视觉信息收集。
🖼️ 关键图片


📊 实验亮点
实验结果表明,DSCD-Nav在HM3Dv1、HM3Dv2和MP3D数据集上均取得了显著的性能提升。具体而言,DSCD-Nav在成功率和路径效率方面均优于现有方法,并且减少了探索冗余。这些结果验证了DSCD-Nav的有效性,表明其能够提高零样本物体导航的可靠性和效率。
🎯 应用场景
DSCD-Nav具有广泛的应用前景,可用于家庭服务机器人、自动驾驶汽车、无人机等需要在复杂和未知环境中进行导航的场景。该方法能够提高导航的可靠性和效率,减少人为干预,从而提升用户体验和降低运营成本。未来,DSCD-Nav可以进一步扩展到更复杂的任务和环境,例如在灾难救援、物流配送等领域发挥重要作用。
📄 摘要(原文)
Adaptive navigation in unfamiliar indoor environments is crucial for household service robots. Despite advances in zero-shot perception and reasoning from vision-language models, existing navigation systems still rely on single-pass scoring at the decision layer, leading to overconfident long-horizon errors and redundant exploration. To tackle these problems, we propose Dual-Stance Cooperative Debate Navigation (DSCD-Nav), a decision mechanism that replaces one-shot scoring with stance-based cross-checking and evidence-aware arbitration to improve action reliability under partial observability. Specifically, given the same observation and candidate action set, we explicitly construct two stances by conditioning the evaluation on diverse and complementary objectives: a Task-Scene Understanding (TSU) stance that prioritizes goal progress from scene-layout cues, and a Safety-Information Balancing (SIB) stance that emphasizes risk and information value. The stances conduct a cooperative debate and make policy by cross-checking their top candidates with cue-grounded arguments. Then, a Navigation Consensus Arbitration (NCA) agent is employed to consolidate both sides' reasons and evidence, optionally triggering lightweight micro-probing to verify uncertain choices, preserving NCA's primary intent while disambiguating. Experiments on HM3Dv1, HM3Dv2, and MP3D demonstrate consistent improvements in success and path efficiency while reducing exploration redundancy.