MeCo: Enhancing LLM-Empowered Multi-Robot Collaboration via Similar Task Memoization
作者: Baiqing Wang, Helei Cui, Bo Zhang, Xiaolong Zheng, Bin Guo, Zhiwen Yu
分类: cs.RO
发布日期: 2026-01-28
💡 一句话要点
MeCo:通过相似任务记忆增强LLM驱动的多机器人协作
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多机器人协作 大型语言模型 任务记忆 相似性学习 计划重用
📋 核心要点
- 现有方法在多机器人协作中,面对相似任务时,缺乏对历史经验的利用,导致重复规划,效率低下。
- MeCo框架通过相似性测试检索相关历史任务,实现计划的缓存和重用,避免LLM的重复调用。
- MeCoBench基准测试表明,MeCo显著降低了规划成本,并提高了多机器人协作的成功率。
📝 摘要(中文)
多机器人系统已广泛应用于实际场景,显著提高了效率并降低了劳动力成本。然而,现有的大多数多机器人协作方法依赖于大量的特定任务训练,这限制了它们对新的或多样化场景的适应性。最近的研究利用大型语言模型(LLM)的语言理解和推理能力,无需专门训练即可实现更灵活的协作。然而,目前基于LLM的方法效率仍然低下:当面对相同或相似的任务时,它们必须从头开始重新规划,因为它们忽略了任务级别的相似性。为了解决这个限制,我们提出了MeCo,一个相似性感知多机器人协作框架,它应用“缓存和重用”(又名记忆化)的原则来减少冗余计算。与简单的任务重复不同,识别和重用相似但不完全相同的任务的解决方案更具挑战性,尤其是在多机器人设置中。为此,MeCo引入了一种新的相似性测试方法,该方法检索先前解决的具有高度相关性的任务,从而无需重新调用LLM即可实现有效的计划重用。此外,我们还提出了MeCoBench,这是第一个旨在评估类似任务协作场景性能的基准。实验结果表明,与最先进的方法相比,MeCo大大降低了规划成本并提高了成功率。
🔬 方法详解
问题定义:现有基于LLM的多机器人协作方法在处理相似任务时,无法有效利用已有的解决方案,需要从头开始重新规划,造成了计算资源的浪费,降低了效率。尤其是在复杂的多机器人环境中,这种重复规划的问题更加突出。
核心思路:MeCo的核心思路是引入“记忆化”机制,即缓存和重用先前解决的相似任务的解决方案。通过识别当前任务与历史任务的相似性,可以直接复用或微调已有的计划,避免重复调用LLM进行规划。这种方法旨在提高多机器人协作的效率和适应性。
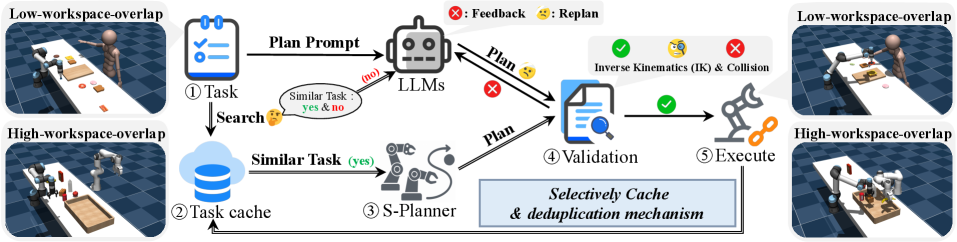
技术框架:MeCo框架主要包含以下几个模块:1) 任务描述模块:将当前任务和历史任务转化为统一的语言描述;2) 相似性测试模块:计算当前任务与历史任务描述之间的相似度,检索最相关的历史任务;3) 计划重用模块:根据检索到的历史任务的解决方案,生成当前任务的初始计划,并进行必要的调整;4) 执行与监控模块:执行生成的计划,并监控执行过程,根据实际情况进行调整。
关键创新:MeCo的关键创新在于提出了一个有效的相似性测试方法,能够准确地识别相似但不完全相同的任务。该方法可能结合了语义相似度分析、任务约束匹配等技术,从而在多机器人协作的复杂环境中实现高效的计划重用。与简单的任务重复利用不同,MeCo能够处理更广泛的相似任务场景。
关键设计:论文中可能涉及的关键设计包括:相似性度量函数的选择(例如,基于Transformer的句子嵌入相似度)、相似性阈值的设定、计划调整策略(例如,基于规则的调整或基于LLM的微调)、以及缓存策略(例如,LRU缓存)。具体的参数设置和算法细节需要在论文中进一步查找。
🖼️ 关键图片


📊 实验亮点
MeCo在MeCoBench基准测试中表现出色,与现有方法相比,显著降低了规划成本并提高了成功率。具体的性能提升数据(例如,规划时间减少百分比、成功率提高百分比)需要在论文中查找。实验结果表明,MeCo能够有效地利用历史经验,提高多机器人协作的效率和可靠性。
🎯 应用场景
MeCo框架可应用于各种多机器人协作场景,例如:仓库物流、智能制造、灾害救援等。通过减少重复规划,可以显著提高机器人的工作效率,降低运营成本。此外,MeCo的相似任务记忆机制也有助于提高机器人在复杂和动态环境中的适应性,使其能够更好地应对各种突发情况。
📄 摘要(原文)
Multi-robot systems have been widely deployed in real-world applications, providing significant improvements in efficiency and reductions in labor costs. However, most existing multi-robot collaboration methods rely on extensive task-specific training, which limits their adaptability to new or diverse scenarios. Recent research leverages the language understanding and reasoning capabilities of large language models (LLMs) to enable more flexible collaboration without specialized training. Yet, current LLM-empowered approaches remain inefficient: when confronted with identical or similar tasks, they must replan from scratch because they omit task-level similarities. To address this limitation, we propose MeCo, a similarity-aware multi-robot collaboration framework that applies the principle of ``cache and reuse'' (a.k.a., memoization) to reduce redundant computation. Unlike simple task repetition, identifying and reusing solutions for similar but not identical tasks is far more challenging, particularly in multi-robot settings. To this end, MeCo introduces a new similarity testing method that retrieves previously solved tasks with high relevance, enabling effective plan reuse without re-invoking LLMs. Furthermore, we present MeCoBench, the first benchmark designed to evaluate performance on similar-task collaboration scenarios. Experimental results show that MeCo substantially reduces planning costs and improves success rates compared with state-of-the-art approaches.