Rhombot: Rhombus-shaped Modular Robots for Stable, Medium-Independent Reconfiguration Motion
作者: Jie Gu, Yirui Sun, Zhihao Xia, Tin Lun Lam, Chunxu Tian, Dan Zhang
分类: cs.RO
发布日期: 2026-01-27
💡 一句话要点
Rhombot:菱形模块化机器人,实现稳定、媒介无关的重构运动
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模块化机器人 自重构机器人 菱形模块 运动规划 机器人控制
📋 核心要点
- 现有模块化自重构机器人控制复杂,难以在不同介质中稳定重构。
- Rhombot采用菱形模块设计,通过单执行器实现折叠和展开,简化控制。
- 实验验证了Rhombot模块的稳定重构能力和位置、对接精度。
📝 摘要(中文)
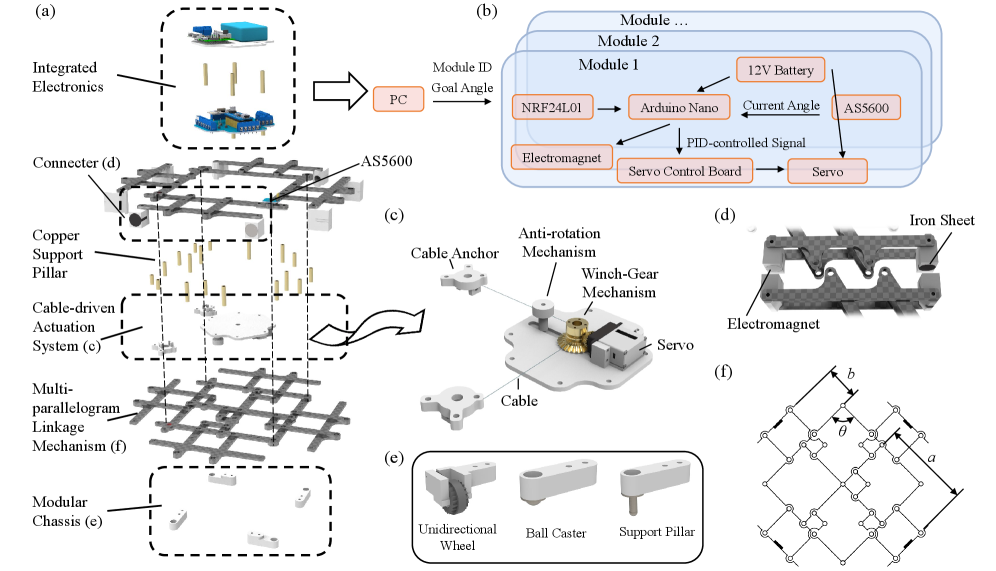
本文提出了一种新型的可变形平面晶格模块化自重构机器人Rhombot,其模块呈菱形。每个模块由一个平行四边形骨架构成,带有一个中心安装的执行器,该执行器能够沿其对角线进行折叠和展开。核心设计理念是以最小的控制复杂度实现MSRR的基本功能,如变形、对接和移动。这使得连续且稳定的重构过程独立于周围介质,从而使系统能够在各种环境中可靠地形成各种配置。为了利用Rhombot独特的运动学特性,我们引入了morphpivoting,这是一种用于重构的新型运动原语,不同于先进的MSRR系统,并提出了一种连续执行它的策略。最后,一系列物理实验验证了该模块稳定的重构能力,以及其位置和对接精度。
🔬 方法详解
问题定义:现有模块化自重构机器人(MSRR)在复杂环境下的稳定性和控制复杂度之间存在矛盾。许多先进的MSRR系统需要复杂的控制算法和大量的传感器反馈来实现重构,这限制了它们在不同介质中的应用。因此,需要设计一种结构简单、控制方便且能在不同环境中稳定重构的MSRR。
核心思路:Rhombot的核心思路是通过菱形模块的几何特性和单执行器的控制方式,简化重构过程的控制复杂度,并提高重构的稳定性。菱形模块的折叠和展开运动能够实现多种构型变化,而单执行器的设计降低了控制系统的复杂性。这种设计使得重构过程对周围介质的依赖性降低,从而提高了在不同环境下的适应性。
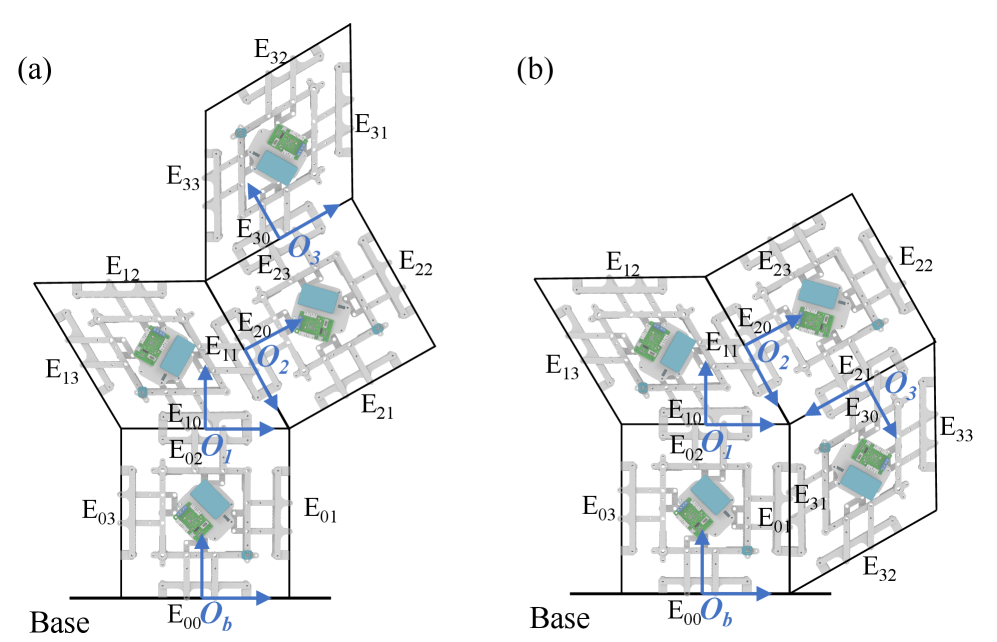
技术框架:Rhombot系统由多个菱形模块组成,每个模块包含一个平行四边形骨架和一个中心安装的执行器。整个系统的重构过程基于一种名为“morphpivoting”的运动原语。该运动原语描述了模块之间如何通过折叠和展开实现相对运动和位置调整。系统通过控制每个模块的执行器,按照预定的morphpivoting序列,实现整体构型的变化和移动。控制系统负责生成执行器指令,并监控模块的状态。
关键创新:Rhombot的关键创新在于其菱形模块的设计和morphpivoting运动原语。菱形模块的几何特性使得其能够通过简单的折叠和展开实现多种构型变化,而无需复杂的运动规划。Morphpivoting运动原语是一种新型的重构运动方式,它不同于传统的MSRR系统中的步进式或连续式运动,而是一种基于模块几何特性的旋转和位移的组合。这种运动原语简化了重构过程的控制,并提高了重构的效率和稳定性。
关键设计:菱形模块的关键设计参数包括菱形的边长、对角线长度以及执行器的力矩输出范围。控制系统采用PID控制算法,根据模块的当前状态和目标状态,生成执行器指令。Morphpivoting运动原语的执行序列需要根据具体的重构目标进行规划,这涉及到模块之间的相对位置和角度的计算。
🖼️ 关键图片

📊 实验亮点
实验结果表明,Rhombot模块能够稳定地进行重构运动,并且具有较高的位置和对接精度。具体而言,模块的位置误差小于5mm,角度误差小于2度。实验还验证了Rhombot在不同环境下的重构能力,包括在平面、斜坡和粗糙地面上的运动。这些结果表明,Rhombot具有较强的鲁棒性和适应性。
🎯 应用场景
Rhombot具有广泛的应用前景,包括搜索救援、环境勘探、管道检测和医疗机器人等领域。其模块化设计使其能够适应各种复杂环境,并执行各种任务。例如,在搜索救援中,Rhombot可以变形通过狭窄的缝隙,并利用其运动能力在废墟中移动。在管道检测中,Rhombot可以改变形状以适应不同直径的管道,并检测管道内部的缺陷。未来,Rhombot有望成为一种通用的模块化机器人平台,为各种应用提供解决方案。
📄 摘要(原文)
In this paper, we present Rhombot, a novel deformable planar lattice modular self-reconfigurable robot (MSRR) with a rhombus shaped module. Each module consists of a parallelogram skeleton with a single centrally mounted actuator that enables folding and unfolding along its diagonal. The core design philosophy is to achieve essential MSRR functionalities such as morphing, docking, and locomotion with minimal control complexity. This enables a continuous and stable reconfiguration process that is independent of the surrounding medium, allowing the system to reliably form various configurations in diverse environments. To leverage the unique kinematics of Rhombot, we introduce morphpivoting, a novel motion primitive for reconfiguration that differs from advanced MSRR systems, and propose a strategy for its continuous execution. Finally, a series of physical experiments validate the module's stable reconfiguration ability, as well as its positional and docking accuracy.