ALRM: Agentic LLM for Robotic Manipulation
作者: Vitor Gaboardi dos Santos, Ibrahim Khadraoui, Ibrahim Farhat, Hamza Yous, Samy Teffahi, Hakim Hacid
分类: cs.RO, cs.CL
发布日期: 2026-01-27
💡 一句话要点
提出ALRM:基于Agentic LLM的机器人操作框架,解决多步骤推理和语言多样性问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人操作 大型语言模型 Agentic框架 ReAct循环 策略生成
📋 核心要点
- 现有基于LLM的机器人控制方法缺乏模块化的agentic执行机制,难以闭环规划和反思。
- ALRM框架通过ReAct风格的推理循环,将策略生成与agentic执行集成,支持代码和工具两种策略模式。
- 新基准包含56个任务,涵盖多种环境和语言指令,实验表明ALRM具有可扩展性和可解释性。
📝 摘要(中文)
大型语言模型(LLMs)最近赋能了agentic框架,使其展现出先进的推理和规划能力。然而,它们在机器人控制流程中的集成仍然受到两个方面的限制:(1)现有的基于LLM的方法通常缺乏模块化的、agentic执行机制,限制了它们以闭环方式规划、反思结果和修改动作的能力;(2)现有的操作任务基准侧重于低级控制,并没有系统地评估多步骤推理和语言变异。在本文中,我们提出了用于机器人操作的Agentic LLM(ALRM),这是一个由LLM驱动的agentic框架,用于机器人操作。ALRM通过ReAct风格的推理循环将策略生成与agentic执行集成,支持两种互补模式:用于直接可执行控制代码生成的Code-as-Policy(CaP)和用于迭代规划和基于工具的动作执行的Tool-as-Policy(TaP)。为了实现系统评估,我们还引入了一个新的模拟基准,包含跨多个环境的56个任务,捕捉了语言上多样化的指令。对十个LLM的实验表明,ALRM提供了一种可扩展、可解释和模块化的方法,用于桥接自然语言推理与可靠的机器人执行。结果表明,Claude-4.1-Opus是CaP下最好的闭源模型,而Falcon-H1-7B是最好的开源模型。
🔬 方法详解
问题定义:现有基于LLM的机器人操作方法,缺乏模块化的agentic执行机制,无法在闭环中进行规划、反思和调整动作。同时,现有的机器人操作任务benchmark,主要集中在低层控制,缺乏对多步骤推理和语言多样性的系统评估。
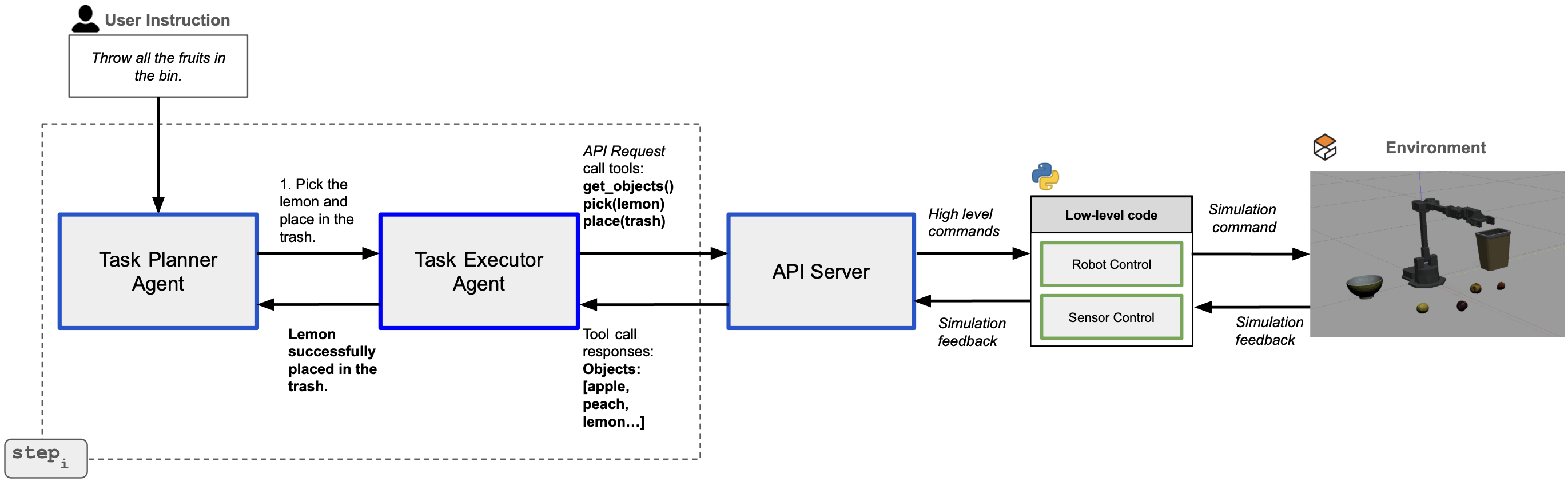
核心思路:ALRM的核心思路是利用Agentic LLM框架,通过ReAct风格的推理循环,将策略生成与agentic执行集成。这种设计允许机器人根据环境反馈迭代地规划和执行动作,从而提高操作的可靠性和灵活性。框架支持两种策略模式:Code-as-Policy (CaP) 和 Tool-as-Policy (TaP),以适应不同的任务需求。
技术框架:ALRM框架包含以下主要模块:1) LLM推理模块:负责根据任务指令和环境反馈生成动作计划;2) Agentic执行模块:负责执行LLM生成的动作计划,并收集环境反馈;3) ReAct循环:LLM推理模块和Agentic执行模块通过ReAct循环进行迭代交互,不断优化动作计划。框架支持两种策略模式:CaP模式直接生成可执行的控制代码,TaP模式则通过迭代规划和工具选择来执行动作。
关键创新:ALRM的关键创新在于将Agentic LLM框架应用于机器人操作,并提出了两种互补的策略模式(CaP和TaP)。与传统的基于LLM的机器人控制方法相比,ALRM具有更强的模块化、可解释性和可扩展性。此外,ALRM还引入了一个新的模拟benchmark,用于系统地评估多步骤推理和语言多样性。
关键设计:ALRM框架的关键设计包括:1) ReAct循环的实现细节,例如prompt的设计、反馈信息的处理方式等;2) CaP和TaP两种策略模式的具体实现,例如控制代码的生成方式、工具的选择策略等;3) 新benchmark的设计,例如任务的选取、环境的设置、语言指令的生成等。论文中没有明确给出关键参数设置、损失函数、网络结构等技术细节,这些可能是根据具体LLM和任务进行调整的(未知)。
🖼️ 关键图片


📊 实验亮点
实验结果表明,ALRM框架在新的模拟benchmark上取得了显著的性能。在CaP模式下,闭源模型Claude-4.1-Opus表现最佳,开源模型Falcon-H1-7B表现最佳。这些结果验证了ALRM框架的有效性和可扩展性,并为未来的研究提供了有价值的参考。
🎯 应用场景
ALRM框架具有广泛的应用前景,例如在智能制造、仓储物流、家庭服务等领域,可以用于实现复杂的操作任务,提高生产效率和服务质量。该研究的实际价值在于提供了一种可扩展、可解释和模块化的方法,用于桥接自然语言推理与可靠的机器人执行。未来,ALRM可以进一步扩展到更复杂的环境和任务中,并与其他机器人技术相结合,例如视觉感知、运动规划等。
📄 摘要(原文)
Large Language Models (LLMs) have recently empowered agentic frameworks to exhibit advanced reasoning and planning capabilities. However, their integration in robotic control pipelines remains limited in two aspects: (1) prior \ac{llm}-based approaches often lack modular, agentic execution mechanisms, limiting their ability to plan, reflect on outcomes, and revise actions in a closed-loop manner; and (2) existing benchmarks for manipulation tasks focus on low-level control and do not systematically evaluate multistep reasoning and linguistic variation. In this paper, we propose Agentic LLM for Robot Manipulation (ALRM), an LLM-driven agentic framework for robotic manipulation. ALRM integrates policy generation with agentic execution through a ReAct-style reasoning loop, supporting two complementary modes: Code-asPolicy (CaP) for direct executable control code generation, and Tool-as-Policy (TaP) for iterative planning and tool-based action execution. To enable systematic evaluation, we also introduce a novel simulation benchmark comprising 56 tasks across multiple environments, capturing linguistically diverse instructions. Experiments with ten LLMs demonstrate that ALRM provides a scalable, interpretable, and modular approach for bridging natural language reasoning with reliable robotic execution. Results reveal Claude-4.1-Opus as the top closed-source model and Falcon-H1-7B as the top open-source model under CaP.