Quest2ROS2: A ROS 2 Framework for Bi-manual VR Teleoperation
作者: Jialong Li, Zhenguo Wang, Tianci Wang, Maj Stenmark, Volker Krueger
分类: cs.RO
发布日期: 2026-01-26
备注: HRI 2026
🔗 代码/项目: GITHUB
💡 一句话要点
Quest2ROS2:用于双臂VR遥操作的ROS2开源框架,扩展机器人数据采集
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: VR遥操作 ROS2框架 双臂机器人 相对运动控制 机器人数据采集
📋 核心要点
- 现有VR遥操作系统受限于工作空间,操作不直观且依赖初始姿态,限制了数据采集效率。
- Quest2ROS2通过相对运动控制,将VR控制器姿态变化转化为机器人运动,实现姿态无关的直观操作。
- 该框架集成了RViz可视化、简化的夹爪控制和暂停重置等功能,并支持多种控制模式,提升用户体验。
📝 摘要(中文)
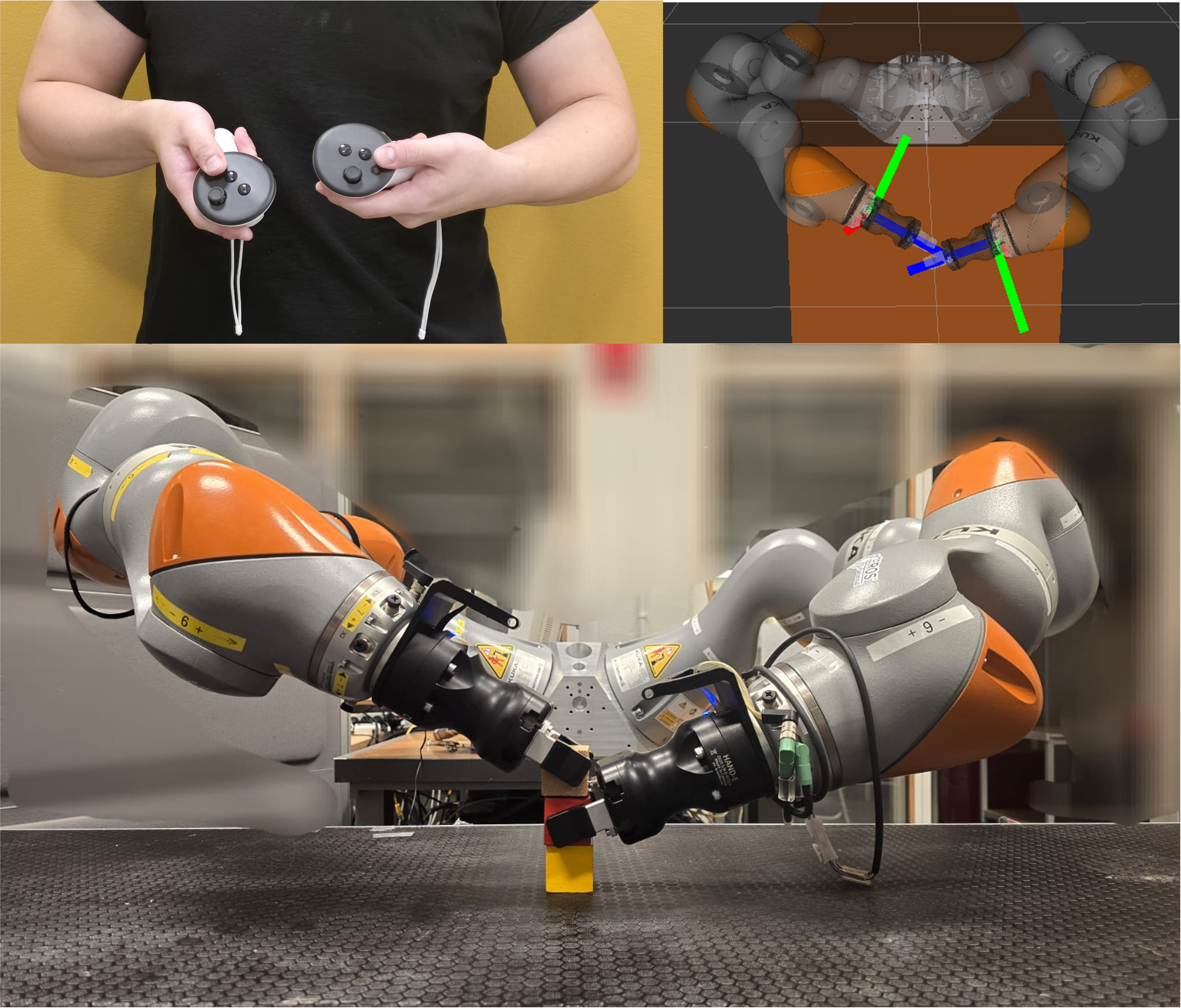
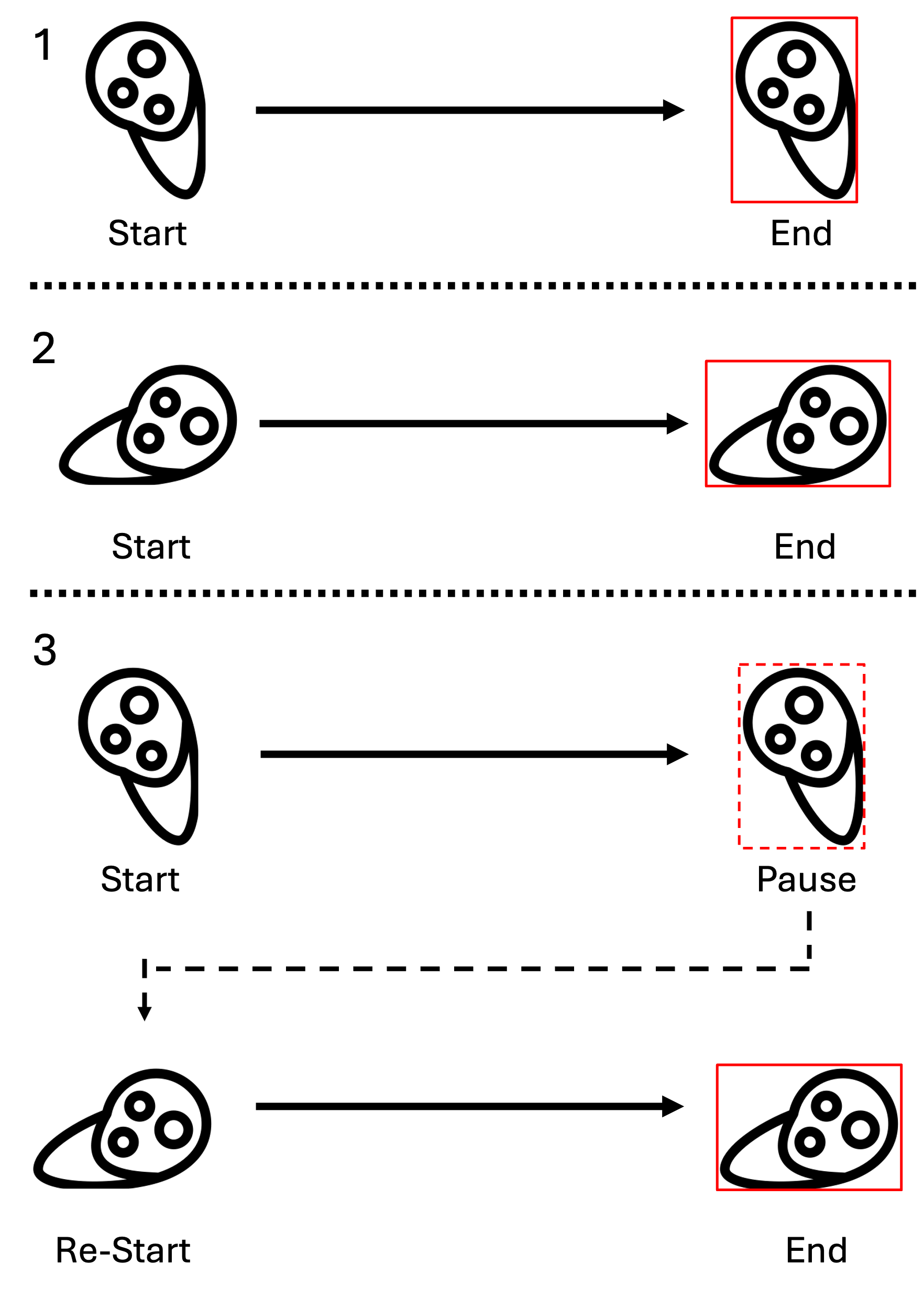
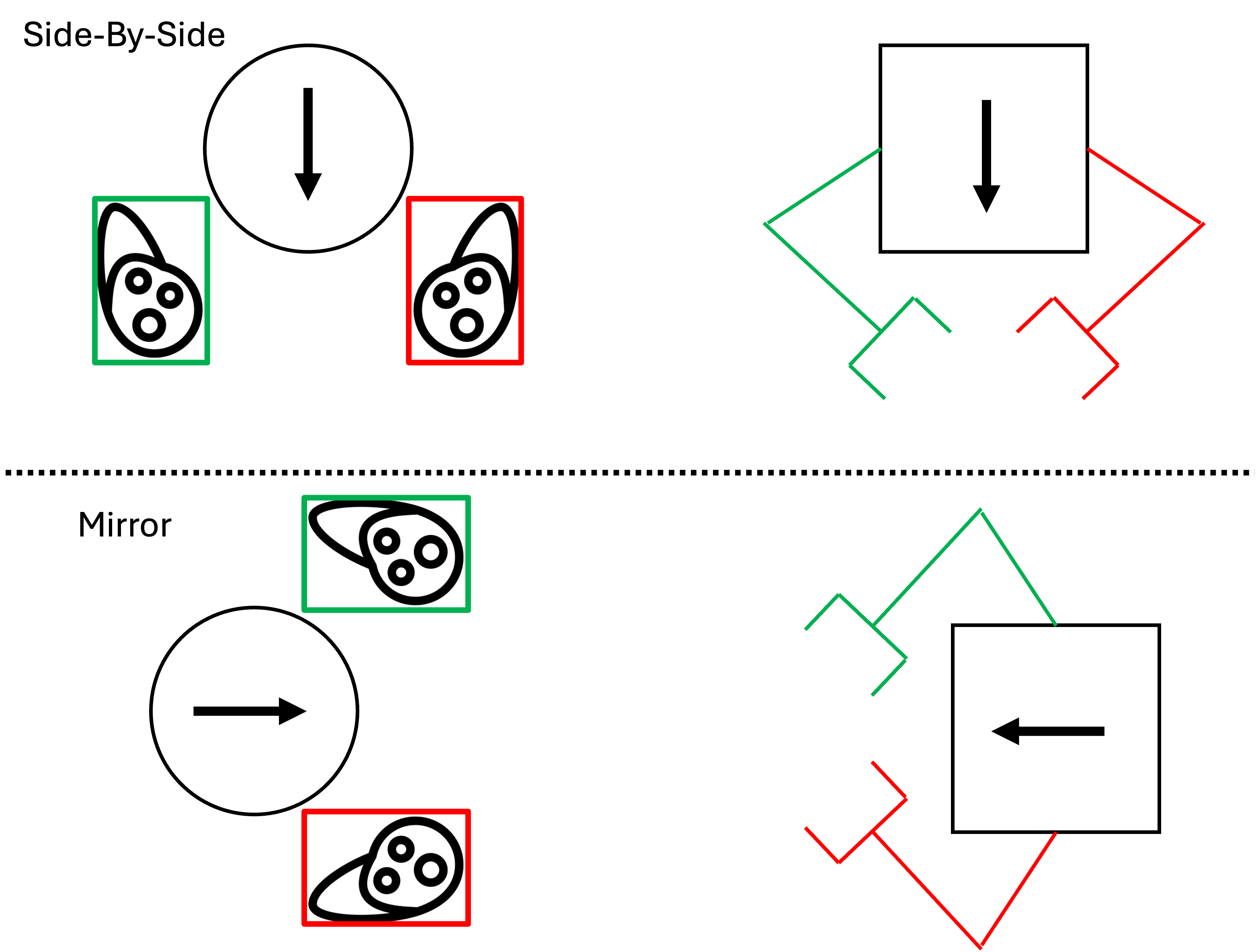
Quest2ROS2是一个开源的ROS2框架,专为扩展机器人数据采集而设计的双臂遥操作系统。它扩展了Quest2ROS,通过基于相对运动的控制克服了工作空间限制,通过VR控制器姿态变化计算机器人运动,从而实现直观、姿态独立的操作。该框架集成了重要的可用性和安全功能,包括实时RViz可视化、简化的夹爪控制以及用于平滑过渡的暂停和重置功能。我们详细介绍了一个模块化架构,该架构支持“并排”和“镜像”控制模式,以优化不同平台上的操作员体验。代码可在https://github.com/Taokt/Quest2ROS2 获取。
🔬 方法详解
问题定义:现有的VR遥操作系统通常受到VR设备跟踪范围的限制,导致机器人的工作空间受限。此外,许多系统依赖于操作者的绝对姿态,使得操作不够直观,并且对操作者的初始姿态有较高要求。这些问题限制了机器人遥操作的效率和适用性,尤其是在需要大量数据采集的场景下。
核心思路:Quest2ROS2的核心思路是采用基于相对运动的控制方法。它不直接将VR控制器的绝对姿态映射到机器人末端执行器的姿态,而是计算VR控制器姿态的相对变化,并将这些变化转化为机器人末端执行器的运动指令。这种方法摆脱了对绝对姿态的依赖,使得操作更加直观,并且能够突破VR设备跟踪范围的限制。
技术框架:Quest2ROS2的整体架构是模块化的,主要包括以下几个模块:VR设备驱动模块(负责从Quest 2获取数据)、运动控制模块(负责将VR控制器的相对运动转化为机器人运动指令)、机器人控制模块(负责将运动指令发送给机器人)、可视化模块(使用RViz进行实时可视化)。此外,该框架还包括安全模块(例如暂停和重置功能)和用户界面模块(用于配置和控制系统)。支持“Side-by-Side”和“Mirror”两种控制模式,前者允许操作员分别控制两个机械臂,后者则将操作员的左右手运动分别映射到两个机械臂。
关键创新:Quest2ROS2最重要的技术创新点在于其基于相对运动的控制方法。这种方法使得操作更加直观,并且能够突破VR设备跟踪范围的限制。此外,该框架的模块化设计和多种控制模式也提高了其灵活性和适用性。
关键设计:该框架的关键设计包括:相对运动的计算方法(例如,使用四元数差值来计算旋转的相对变化),运动指令的平滑处理(以避免机器人运动的突变),以及安全机制的实现(例如,通过设置速度和加速度限制来防止机器人碰撞)。此外,用户界面允许用户自定义控制参数,例如运动比例因子和夹爪控制方式。
🖼️ 关键图片
📊 实验亮点
论文重点在于框架的设计与实现,而非具体的实验数据。其亮点在于提供了一个易于使用、可扩展的开源框架,能够显著简化双臂VR遥操作系统的开发流程。通过提供多种控制模式和安全机制,Quest2ROS2能够提升操作员的体验和安全性,从而提高机器人数据采集的效率。
🎯 应用场景
Quest2ROS2适用于各种需要双臂遥操作的场景,例如远程医疗、危险环境下的机器人操作、以及机器人数据采集。该框架可以用于训练机器人执行复杂任务,例如装配、抓取和放置等。通过扩展机器人数据采集能力,可以加速机器人学习和算法开发,促进机器人技术在工业、医疗等领域的应用。
📄 摘要(原文)
Quest2ROS2 is an open-source ROS2 framework for bi-manual teleoperation designed to scale robot data collection. Extending Quest2ROS, it overcomes workspace limitations via relative motion-based control, calculating robot movement from VR controller pose changes to enable intuitive, pose-independent operation. The framework integrates essential usability and safety features, including real-time RViz visualization, streamlined gripper control, and a pause-and-reset function for smooth transitions. We detail a modular architecture that supports "Side-by-Side" and "Mirror" control modes to optimize operator experience across diverse platforms. Code is available at: https://github.com/Taokt/Quest2ROS2.