Boosting Deep Reinforcement Learning with Semantic Knowledge for Robotic Manipulators
作者: Lucía Güitta-López, Vincenzo Suriani, Jaime Boal, Álvaro J. López-López, Daniele Nardi
分类: cs.RO, cs.AI
发布日期: 2026-01-23
期刊: Robotics, published 24 June 2025
💡 一句话要点
提出基于语义知识增强的深度强化学习方法,提升机器人操作效率。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 深度强化学习 机器人操作 知识图嵌入 语义知识 样本效率
📋 核心要点
- 深度强化学习在机器人控制中面临样本效率低下的挑战,需要大量的训练数据和时间。
- 该论文提出将知识图嵌入(KGEs)融入DRL框架,为智能体提供环境的语义上下文信息,从而加速学习过程。
- 实验结果表明,该方法显著降低了学习时间,并提高了任务的准确性,验证了语义知识在机器人DRL中的有效性。
📝 摘要(中文)
深度强化学习(DRL)是解决复杂序列决策问题的强大框架,尤其是在机器人控制领域。然而,其在实际部署中常因学习所需的大量经验而受限,导致高昂的计算和时间成本。本文提出了一种新颖的DRL与语义知识集成方法,以知识图嵌入(KGEs)的形式,旨在通过向智能体提供上下文信息来提高学习效率。我们的架构将KGEs与视觉观察相结合,使智能体能够在训练期间利用环境知识。在具有固定和随机目标属性的环境中,对机器人操作器的实验验证表明,我们的方法在不增加训练时间或计算复杂性的情况下,学习时间最多可减少60%,任务准确率提高约15个百分点。这些结果突出了语义知识在降低样本复杂性和提高DRL在机器人应用中的有效性方面的潜力。
🔬 方法详解
问题定义:现有深度强化学习方法在机器人操作任务中,需要大量的训练数据才能达到较好的性能,这导致训练时间长,计算资源消耗大。尤其是在环境复杂或目标属性随机变化的情况下,样本效率问题更加突出。因此,如何提高DRL的样本效率,使其能够更快地适应新的环境和任务,是亟待解决的问题。
核心思路:该论文的核心思路是将语义知识融入到DRL框架中,利用知识图嵌入(KGEs)来表示环境中的实体和关系,为智能体提供更丰富的上下文信息。通过将KGEs与视觉观察相结合,智能体可以更好地理解环境,从而更快地学习到最优策略。这种方法旨在减少对大量样本的依赖,提高学习效率。
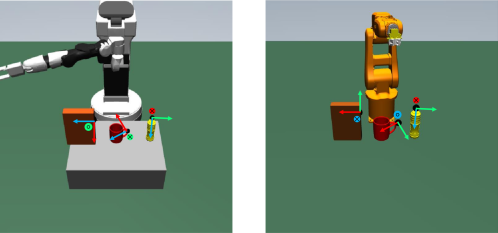
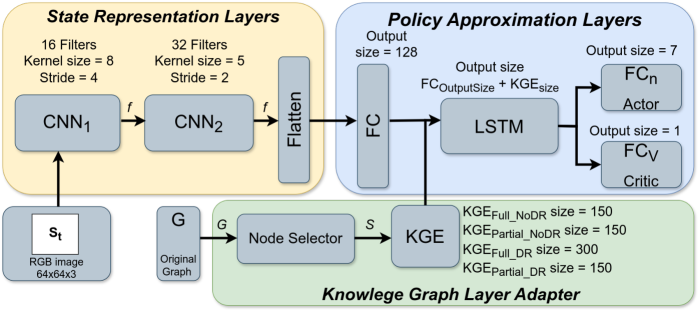
技术框架:该方法的技术框架主要包括以下几个模块:1) 视觉感知模块,用于从环境中获取视觉观察;2) 知识图嵌入模块,用于将环境中的实体和关系编码成低维向量表示;3) 融合模块,用于将视觉观察和知识图嵌入进行融合,得到智能体的状态表示;4) DRL智能体,基于融合后的状态表示,学习最优策略。整体流程是:智能体首先通过视觉感知模块获取环境信息,然后通过知识图嵌入模块获取环境的语义信息,接着将两者融合,最后利用DRL算法进行策略学习。
关键创新:该论文的关键创新在于将知识图嵌入(KGEs)与深度强化学习(DRL)相结合,为机器人操作任务提供了一种新的解决方案。与传统的DRL方法相比,该方法能够利用环境的语义知识,从而提高学习效率和任务准确性。这种方法的本质区别在于,它不仅仅依赖于视觉观察,还能够利用环境的结构化知识,从而更好地理解环境,做出更明智的决策。
关键设计:论文中关于KGEs的具体嵌入方式和融合方法(例如,使用哪种知识图嵌入模型,如何将KGEs与视觉特征进行拼接或注意力加权等)以及DRL智能体的具体网络结构(例如,使用哪种DRL算法,网络层数,激活函数等)的具体细节未知。损失函数的设计也未知,但推测会包含DRL算法自身的损失函数,以及可能用于约束KGEs学习的辅助损失函数。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在机器人操作任务中,学习时间最多可减少60%,任务准确率提高约15个百分点。与传统的DRL方法相比,该方法在样本效率和任务性能方面均有显著提升。这些结果表明,语义知识在机器人DRL中具有重要的作用,可以有效地提高学习效率和任务准确性。
🎯 应用场景
该研究成果可应用于各种需要机器人操作的场景,例如工业自动化、物流仓储、医疗手术等。通过提高机器人学习效率和任务准确性,可以降低部署成本,提高生产效率,并扩展机器人的应用范围。未来,该方法有望应用于更复杂的环境和任务,例如家庭服务机器人、灾难救援机器人等。
📄 摘要(原文)
Deep Reinforcement Learning (DRL) is a powerful framework for solving complex sequential decision-making problems, particularly in robotic control. However, its practical deployment is often hindered by the substantial amount of experience required for learning, which results in high computational and time costs. In this work, we propose a novel integration of DRL with semantic knowledge in the form of Knowledge Graph Embeddings (KGEs), aiming to enhance learning efficiency by providing contextual information to the agent. Our architecture combines KGEs with visual observations, enabling the agent to exploit environmental knowledge during training. Experimental validation with robotic manipulators in environments featuring both fixed and randomized target attributes demonstrates that our method achieves up to {60}{\%} reduction in learning time and improves task accuracy by approximately 15 percentage points, without increasing training time or computational complexity. These results highlight the potential of semantic knowledge to reduce sample complexity and improve the effectiveness of DRL in robotic applications.