RENEW: Risk- and Energy-Aware Navigation in Dynamic Waterways
作者: Mingi Jeong, Alberto Quattrini Li
分类: cs.RO, cs.AI
发布日期: 2026-01-23
备注: 9 pages, 10 figure, 4 tables, AAAI 2026 (main track; oral acceptance)
💡 一句话要点
RENEW:动态水域中风险与能量感知的自主水面艇导航
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自主水面艇 路径规划 风险感知 能量优化 动态环境 水域导航 拓扑多样性
📋 核心要点
- 现有水面艇导航方法难以在动态水域中同时考虑风险、能量消耗和拓扑路径多样性,导致导航安全性和效率降低。
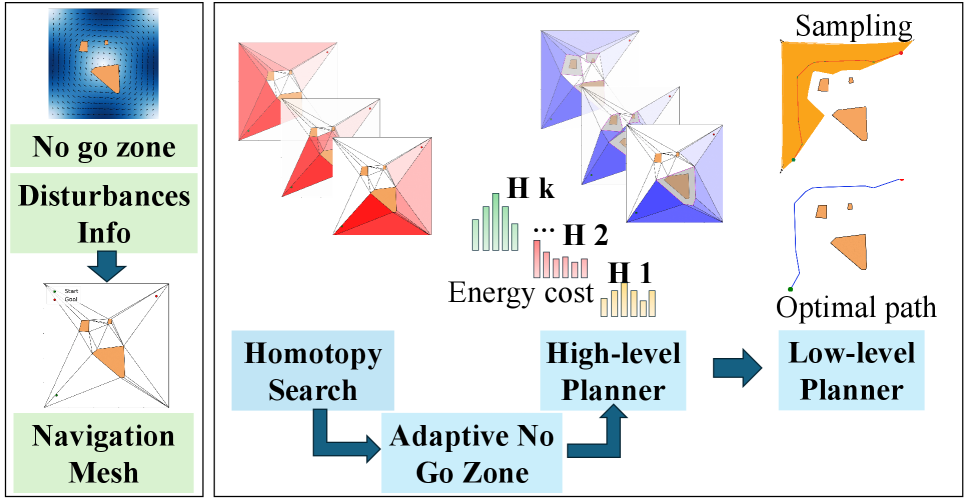
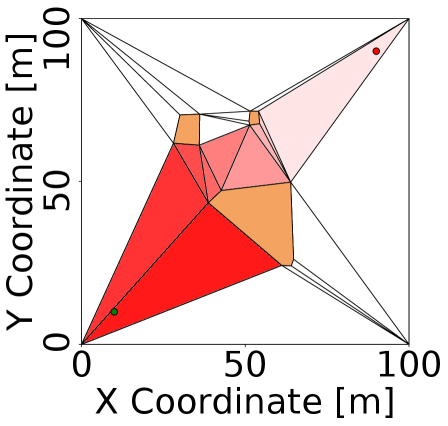
- RENEW通过统一的风险和能量感知策略,动态识别不可航行区域,并结合高层约束三角剖分和低层轨迹优化,实现安全高效的导航。
- 通过真实海洋数据验证,RENEW能够有效应对动态环境中的外部扰动,并在保证安全性的同时优化能量消耗。
📝 摘要(中文)
本文提出RENEW,一种用于自主水面艇(ASV)在具有外部扰动(例如,水流)的动态环境中进行全局路径规划的方法。RENEW引入了一种统一的风险和能量感知策略,通过动态识别不可航行区域并实施自适应安全约束来确保安全。受到海上应急计划的启发,它采用了一种尽力而为的策略,以在不利条件下保持控制。该分层架构结合了用于拓扑多样性的高层约束三角剖分和安全走廊内的低层轨迹优化。通过真实海洋数据验证,RENEW是第一个联合解决自适应不可航行性和拓扑路径多样性以实现稳健海上导航的框架。
🔬 方法详解
问题定义:论文旨在解决自主水面艇(ASV)在动态水域环境中的全局路径规划问题。现有方法通常难以同时兼顾安全性(规避风险区域)、能量效率(降低能量消耗)以及拓扑路径多样性(探索不同路径的可能性)。尤其是在存在水流等外部扰动的情况下,传统方法容易陷入局部最优或无法有效应对突发风险。
核心思路:RENEW的核心思路是采用一种统一的风险和能量感知策略,动态地识别不可航行区域,并根据环境变化自适应地调整安全约束。同时,借鉴海上应急计划的思想,采用“尽力而为”策略,在不利条件下维持控制。通过分层架构,兼顾全局拓扑多样性和局部轨迹优化。
技术框架:RENEW采用分层架构,包含以下主要模块:1) 风险评估模块:基于环境数据(如水流、障碍物)动态识别不可航行区域。2) 高层路径规划模块:采用约束三角剖分方法,生成具有拓扑多样性的候选路径。3) 安全走廊生成模块:基于风险评估结果,为候选路径生成安全走廊。4) 低层轨迹优化模块:在安全走廊内,通过轨迹优化算法,生成能量最优的导航轨迹。
关键创新:RENEW的关键创新在于:1) 统一的风险和能量感知策略:将风险评估和能量消耗纳入统一的优化框架,实现安全性和效率的平衡。2) 自适应不可航行性处理:能够动态识别和规避不可航行区域,提高导航的鲁棒性。3) 拓扑路径多样性探索:通过约束三角剖分,探索不同的路径拓扑结构,避免陷入局部最优。
关键设计:RENEW的关键设计包括:1) 风险评估函数:用于量化不同区域的风险程度,可以根据具体应用场景进行调整。2) 约束三角剖分算法:用于生成具有拓扑多样性的候选路径,需要合理设置约束条件,以保证路径的可行性。3) 轨迹优化目标函数:需要综合考虑能量消耗、路径长度、安全性等因素,并进行合理的权重设置。
🖼️ 关键图片

📊 实验亮点
RENEW通过真实海洋数据进行了验证,结果表明,该方法能够有效应对动态水域环境中的外部扰动,并在保证安全性的前提下,优化能量消耗。具体性能数据未知,但论文强调RENEW是首个联合解决自适应不可航行性和拓扑路径多样性的框架,表明其在同类方法中具有显著优势。
🎯 应用场景
RENEW可应用于多种水面自主导航场景,例如:海洋环境监测、水上搜救、港口物流、海上风电场巡检等。该研究成果有助于提高自主水面艇在复杂水域环境中的导航安全性、效率和可靠性,降低运营成本,并为未来智能航运的发展提供技术支撑。
📄 摘要(原文)
We present RENEW, a global path planner for Autonomous Surface Vehicle (ASV) in dynamic environments with external disturbances (e.g., water currents). RENEW introduces a unified risk- and energy-aware strategy that ensures safety by dynamically identifying non-navigable regions and enforcing adaptive safety constraints. Inspired by maritime contingency planning, it employs a best-effort strategy to maintain control under adverse conditions. The hierarchical architecture combines high-level constrained triangulation for topological diversity with low-level trajectory optimization within safe corridors. Validated with real-world ocean data, RENEW is the first framework to jointly address adaptive non-navigability and topological path diversity for robust maritime navigation.