TeNet: Text-to-Network for Compact Policy Synthesis
作者: Ariyan Bighashdel, Kevin Sebastian Luck
分类: cs.RO, cs.AI
发布日期: 2026-01-22
💡 一句话要点
TeNet:提出一种文本到网络的紧凑策略合成方法,用于资源受限的机器人控制任务。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 文本到网络 机器人控制 自然语言指令 超网络 策略合成
📋 核心要点
- 现有机器人自然语言指令跟随方法依赖于手工设计的接口或大型端到端模型,难以部署于实时控制。
- TeNet利用预训练LLM将文本嵌入转换为超网络,生成紧凑且可执行的机器人策略,仅在实例化时使用语言。
- 实验表明,TeNet生成的策略比序列模型小几个数量级,并在多任务和元学习中表现出色,支持高频控制。
📝 摘要(中文)
本文提出了一种名为TeNet(Text-to-Network)的框架,用于直接从自然语言描述中实例化紧凑、特定于任务的机器人策略。TeNet利用预训练的大型语言模型(LLM)生成的文本嵌入来调节超网络,从而生成完全可执行的策略,该策略仅在高控制频率下对低维状态输入进行操作。通过仅在策略实例化时使用一次语言,TeNet继承了预训练LLM的通用知识和释义鲁棒性,同时在执行时保持轻量级和高效。为了提高泛化能力,该方法选择性地通过将文本嵌入与演示动作对齐,在训练期间将语言与行为联系起来,而在推理时不需要任何演示。在MuJoCo和Meta-World基准测试上的实验表明,TeNet生成的策略比基于序列的基线小几个数量级,同时在多任务和元学习设置中都取得了强大的性能,并支持高频控制。这些结果表明,文本条件超网络提供了一种构建紧凑的、语言驱动的控制器,用于具有实时要求的资源受限的机器人控制任务的实用方法。
🔬 方法详解
问题定义:现有机器人控制方法,特别是那些依赖自然语言指令的方法,通常面临两个主要问题。一是需要手工设计接口,限制了灵活性和泛化能力。二是依赖大型端到端模型,这些模型计算成本高昂,难以部署到资源受限的机器人平台上进行实时控制。因此,需要一种方法能够利用自然语言的表达能力,同时生成紧凑高效的控制策略。
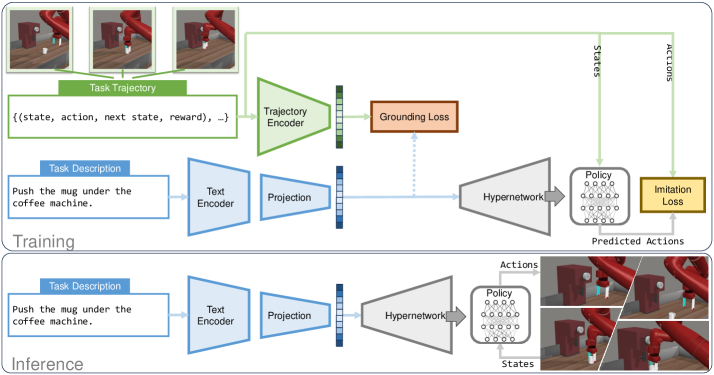
核心思路:TeNet的核心思路是利用预训练的大型语言模型(LLM)的强大语言理解能力,将自然语言指令转化为一个紧凑的、可执行的神经网络策略。通过使用超网络(hypernetwork),TeNet能够根据文本嵌入动态地生成策略网络的权重,从而实现文本到策略的直接映射。这种方法的关键在于,语言信息仅在策略实例化时使用一次,之后策略的执行完全依赖于低维状态输入,从而保证了执行效率。
技术框架:TeNet框架包含以下几个主要模块:1) 文本编码器:使用预训练的LLM(例如BERT)将自然语言指令编码为文本嵌入。2) 超网络:一个小型神经网络,以文本嵌入作为输入,生成策略网络的权重。3) 策略网络:一个小型神经网络,以低维状态作为输入,输出控制动作。训练过程包括:a) 使用行为克隆或强化学习训练策略网络。b) 使用文本嵌入和策略网络权重训练超网络,使其能够根据文本生成相应的策略网络权重。可选地,可以通过对齐文本嵌入和演示动作来提高泛化能力。
关键创新:TeNet最重要的创新点在于它使用超网络将文本嵌入直接映射到策略网络的权重,从而避免了传统方法中需要手动设计接口或训练大型端到端模型的缺点。这种方法能够生成非常紧凑的策略网络,同时继承了预训练LLM的语言理解能力和泛化能力。此外,TeNet在推理时不需要任何演示,使其更易于部署到实际机器人应用中。
关键设计:TeNet的关键设计包括:1) 使用预训练的LLM作为文本编码器,以利用其强大的语言理解能力。2) 使用超网络生成策略网络的权重,以实现文本到策略的直接映射。3) 使用低维状态作为策略网络的输入,以保证执行效率。4) 可以选择性地使用行为克隆或强化学习来训练策略网络。5) 可以通过对齐文本嵌入和演示动作来提高泛化能力。损失函数通常包括策略网络的行为克隆损失或强化学习奖励,以及超网络的权重预测损失。
🖼️ 关键图片
📊 实验亮点
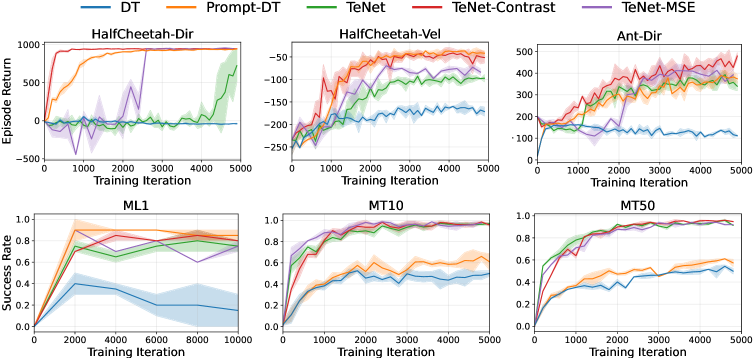
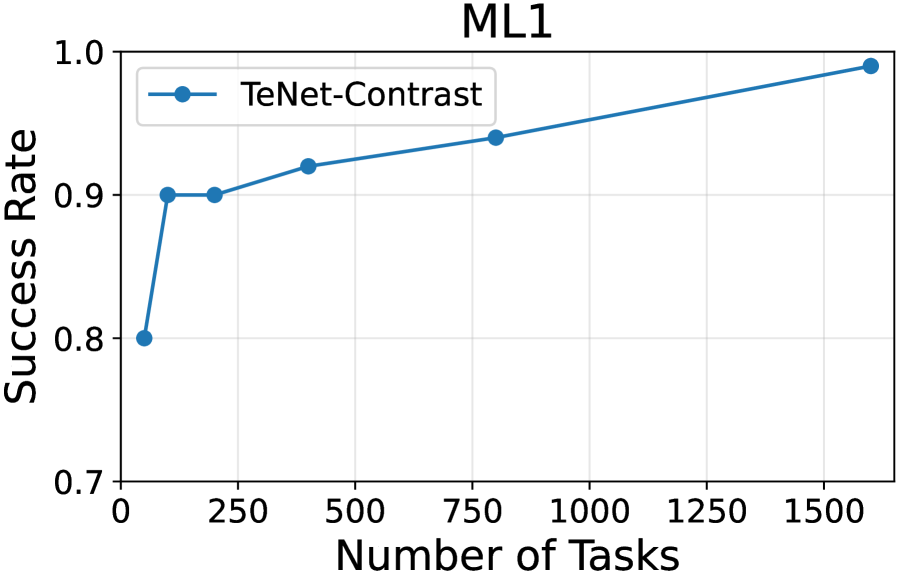
实验结果表明,TeNet在MuJoCo和Meta-World基准测试中表现出色。与基于序列的基线方法相比,TeNet生成的策略网络体积小几个数量级,同时在多任务和元学习设置中取得了相当甚至更好的性能。例如,在某些任务中,TeNet能够以更小的模型尺寸实现与大型端到端模型相当的性能,并支持更高频率的控制。
🎯 应用场景
TeNet具有广泛的应用前景,尤其适用于资源受限的机器人控制任务,例如无人机集群控制、移动机器人导航、以及微型机器人操作等。该方法能够利用自然语言指令快速生成特定任务的控制策略,降低了机器人编程的复杂性,并提高了机器人的适应性和灵活性。未来,TeNet有望应用于更复杂的机器人系统,实现更高级别的自主控制。
📄 摘要(原文)
Robots that follow natural-language instructions often either plan at a high level using hand-designed interfaces or rely on large end-to-end models that are difficult to deploy for real-time control. We propose TeNet (Text-to-Network), a framework for instantiating compact, task-specific robot policies directly from natural language descriptions. TeNet conditions a hypernetwork on text embeddings produced by a pretrained large language model (LLM) to generate a fully executable policy, which then operates solely on low-dimensional state inputs at high control frequencies. By using the language only once at the policy instantiation time, TeNet inherits the general knowledge and paraphrasing robustness of pretrained LLMs while remaining lightweight and efficient at execution time. To improve generalization, we optionally ground language in behavior during training by aligning text embeddings with demonstrated actions, while requiring no demonstrations at inference time. Experiments on MuJoCo and Meta-World benchmarks show that TeNet produces policies that are orders of magnitude smaller than sequence-based baselines, while achieving strong performance in both multi-task and meta-learning settings and supporting high-frequency control. These results show that text-conditioned hypernetworks offer a practical way to build compact, language-driven controllers for ressource-constrained robot control tasks with real-time requirements.